
Выберите 3 основные причины столкновения судов связанных с человеческим фактором
Обновлено: 26.07.2024
Едва ли не самое значительное число коллизий разнонациональных законов в сфере международного торгового судоходства возникает в связи со столкновением судов на море. Достигнутая в этой области определенная международная унификация норм морского права сократила число возможных случаев конфликта национальных законов при разрешении дел о возмещении ущерба от столкновения судов, но не устранила их полностью.
Одной из причин возникновения коллизий разнонациональных законов по делам о столкновении судов является отсутствие в Международной конвенции 1910 года определения таких понятий, как «вина» и «причинная связь», хотя ответственность судовладельца по конвенции и принятым на ее основе национальным законам основана на принципе вины.
В качестве примера различного толкования понятия «вина» можно сослаться на решение суда Роттердама от 18 июня 1963 г. по делу о столкновении норвежского и испанского судов в открытом море(1).
По вопросу о применении к обязательствам сторон правил Конвенции 1910 года не возникало сомнений, так как и Испания, и Норвегия являются ее участницами.
Разногласия возникли по вопросу толкования понятия «вина», не раскрытого, как уже упоминалось, в самой конвенции. Истец — норвежский судовладелец поддерживал в данном случае точку зрения судебной практики и доктрины Нидерландов, согласно которой достаточным основанием для возложения на судовладельца ответственности является действие или упущение самого судна и наступление ущерба в связи с фактом, происшедшим на борту судна. В этой связи не имеет якобы значения, кому можно приписать вину за столкновение: судовладельцу и (или) лицам, за которых он несет ответственность. Голландский автор Клеверинга, например, на основе анализа голландской судебной практики делает вывод, что в Конвенции 1910 года имеется в виду не вина конкретного лица, за действия или упущения которого отвечает судовладелец, а неправильные действия или упущения самого судна(2).
Ответчик — испанский судовладелец сослался на то что как испанское, так и норвежское право толкуют ст. 3 конвенции в том смысле, что в ней подразумевается как вина судовладельца, так и вина лиц, за которых он песет ответственность. Голландский суд отверг толкование этого вопроса по голландскому праву, отметив отсутствие связи между данным столкновением и голландским правом, и принял толкование понятия «вина», признанное в законах флагов столкнувшихся судов.
Основанием для возникновения конфликта законов по делам о столкновении судов на море является и то, что некоторые государства, играющие значительную роль в мировом торговом судоходстве, не являются участниками конвенции. Это прежде всего Соединенные Штаты Америки, законодательство которых в существенных вопросах расходится с национальными законами государств—участников Конвенции 1910 года, воспроизводящими ее правила.
Основное расхождение между ними заключается в том, что в законодательстве США, в отличие от Конвенции 1910 года, не предусмотрено правило о распределении ответственности между судовладельцами соразмерно степени вины их судов. В случае «смешанной» вины столкнувшихся судов степень их вины считается по американскому закону одинаковой и соответственно этому убытки распределяются поровну.
Второе значительное расхождение состоит в том, что вместо долевой ответственности судовладельцев перед третьими лицами за вред, причиненный имуществу, американские суды применяют в этом случае принцип солидарной ответственности столкнувшихся судов. Такая практика выгодна грузовладельцам, но очень невыгодна судовладельцам, которые оказываются в менее благоприятном положении.
Одним из самых важных вопросов, не решенных Конвенцией 1910 года, является вопрос об ограничении ответственности судовладельцев в случае столкновения судов. Основанием для конфликтов законов об ограничении ответственности являются как значительные расхождения между национальными законами, регулирующими эти проблемы, или между системами ограничения ответственности, в которые можно было бы условно объединить различные национальные законы, так и недостаточно широкий охват государств международными конвенциями об ограничении ответственности судовладельцев(3).
Институт ограничения ответственности судовладельцев представляет собой специфический институт морского права. Специалисты в области морского права склоняются к тому, чтобы сохранить его и в настоящее время, в связи с особыми условиями мореплавания, в частности с присущим ему дополнительным риском. Сущность института ограничения ответственности судовладельца заключается в том, что независимо от действительного размера причиненных убытков ответственность судовладельца по определенным требованиям ограничивается установленными пределами.
В зарубежном морском праве различают три основные системы ограничения ответственности судовладельца. Согласно первой из них, получившей условное название «французская», или система абандона, судовладелец отвечает лично, то есть любым принадлежащим ему имуществом. Сущность этой системы состоит в том, что, используя право выбора имущества, на которое кредиторы ( потерпевшие) могут обратить взыскание, судовладелец может отказаться в пользу кредиторов от своего «морского имущества» (т. е. судна и фрахта). В случае такого отказа, именуемого абандоном, все требования кредиторов в отношении любого числа происшествий в данном рейсе считаются удовлетворенными(4).
По второй системе (условно именуемой «германской») взыскание кредиторов может быть обращено на судно и фрахт. Итак, в отличие от системы абандона, судовладелец по определенным требованиям отвечает не лично, а только судном и фрахтом (§ 486 Торгового кодекса ФРГ). Учитывая, что ответственность судовладельца ограничена стоимостью судна и фрахта, в случае гибели судна и утраты права на фрахт он никакой имущественной ответственности перед кредиторами не несет. Основные принципы этой системы используются в Кодексе судоходства и воздухоплавания Италии, однако по некоторым вопросам между итальянским законодательством и законодательством ФРГ имеются расхождения.
Третья система («английская») существенно отличается от двух уже рассмотренных нами систем, поскольку ограничение ответственности по этой системе не связано cо стоимостью судна, а определяется путем умножения определенного количества денежных единиц на нетто-регистровый тоннаж судна, включая тоннаж машинного отделения. В случае гибели или повреждения имущества на указанный тоннаж умножается 1000 золотых франков, а по требованиям за по5вреждение здоровья или смерть — 3100 золотых франков(5).
По законодательству США (ст. 186 Закона США об ограничении ответственности), в случае утраты и повреждения имущества, столкновения судов и совершения иных действий без согласия и ведома судовладельцев, судовладелец несет ответственность по имущественным и личным требованиям в пределах стоимости судна и фрахта и может освободиться от обязательств, передав кредиторам судно и фрахт. По закону, принятому в США в дополнение к основному закону об ограничении ответственности судовладельца, в случае причинения личного вреда устанавливается дополнительный предел ответственности (сверх стоимости судна и фрахта) в размере 60 долл. с каждой брутто-регистровой тонны судна.
Положения Кодекса торгового мореплавания СССР (гл. XVI) значительно отличаются от иностранных законов, основанных на правилах Международной конвенции 1957 года об ограничении ответственности судовладельцев, и от других иностранные законов, посвященных этому вопросу. Одно из принципиальных отличий заключается в том, что советское морское законодательство, исходя из гуманных соображений, вообще не ограничивает ответственность судовладельца за вред, причиненный жизни или здоровью людей. Ограничение ответственности, согласно ст. 275 Кодекса торгового мореплавания СССР, не применяется также в отношении требований, вытекающих из трудовых отношений, и требований по социальному страхованию. Между советским правом и иностранными законами об ограничении ответственности судовладельца имеется и ряд других расхождений.
В правовой литературе стран континентальной Европы известны две теории о соотношении столкновения (т. е. условий возложения ответственности за столкновение судов на море) и ограничения ответственности судовладельца, виновного в столкновении.
Первая из них, так называемая теория «зависимости», утверждает, что проблема ограничения ответственности судовладельца должна решаться на основании того же закона, который применяется к определению условий возложения ответственности за столкновение. Аргументы сторонников этой теории сводятся к следующему: 1) основные факты (определение ответственности за столкновение в рассматриваемом случае) и обязательства, вытекающие из столкновения (последствия столкновения), к которым, по их мнению, относится и ограничение ответственности судовладельца, должны якобы быть подчинены как взаимосвязанные одному и тому же закону; 2) в случае применения к решению этих двух проблем одного и того же закона, ответственность столкнувшихся судов ограничивалась бы на основании одних и тех же правил и ее пределы могли бы быть установлены очень легко.
Эта теория является преобладающей в судебной практике капиталистических государств. Она находит поддержку Кассационного суда Франции, Кассационного суда Бельгии, Федерального суда ФРГ, судов Англии, в судебных органах Голландии и Дании. Этой теории придерживаются французские юристы Ж. Рипер и Р. Жамбю-Мерлэн, западногерманские юристы X. Абрахам, М. Вольф и др.
Вторая теория — теория «независимости» исходит из независимости правового института ограничения ответственности судовладельца от условий возложения ответственности за столкновение (распределения ответственности судовладельцев между собой, их ответственности перед третьими лицами и т. д.). Отсюда сторонники этой теории делают вывод о необходимости решения коллизионного вопроса об ограничении ответственности судовладельца, исходя из особого правила — принципа закона флага судна, вызвавшего столкновение (правонарушителя). Критерию единства основного факта — столкновения судов и его последствий, ограничения ответственности судовладельца — сторонники этой теории противопоставляют единство ограниченной ответственности судовладельцев, которая относится не только к столкновению судов, но и частично (по законам ряда государств) к спасательному вознаграждению и распределению убытков по общей аварии.
Эта теория превалирует в правовой доктрине Франции (М. Симон-Депитр, К. Лежандр, А. Батиффоль). Ее сторонниками являются западногерманский юрист Г. Кегель, датский юрист Э. Сисби и др.
Точка зрения, согласно которой условия возложения ответственности на судовладельцев, с одной стороны, и ограничение их ответственности за столкновение — с другой, должны решаться по различным законам, нашла поддержку в решении Апелляционного суда Брюсселя по делу о столкновении финского судна «Inga» с голландским судном «Axeldijk»; в решении голландского суда Роттердама от 12 июля 1962 г. Такую же позицию занял датский суд Копенгагена при рассмотрении дела о столкновении в польских территориальных водах финского и датского пароходов. Твердо ее придерживались судебные органы Норвегии, в том числе Верховный суд этой страны.
В указанных решениях, в которых шла речь о столкновениях в территориальных водах, к условиям возложения ответственности за столкновение суды применяли закон места столкновения, а к ограничению ответственности судовладельца — закон флага судна, вызвавшего столкновение (подробнее об этих решениях см. в разделах, посвященных соответственно Бельгии, Нидерландам и Норвегии).
Последняя точка зрения, лежащая в основе теории «независимости», представляется правильной. Закон флага судна — право, наиболее тесно связанное с правоотношением по ограничению ответственности судовладельца, виновного в столкновении. Кроме того, ограничение ответственности является, по нашему мнению, одним из атрибутов правового положения судовладельческой компании, которое определяется законом ее «национальности». Как правило, национальность судовладельца или судовладельческой компании и флаг судна, являющегося их собственностью, должны совпадать.
Морские законодательства СССР и Болгарии рассматривают институт ограничения ответственности судовладельца за столкновение и институт условий возложения такой ответственности как два самостоятельных правовых института и применяют к ним при разрешении конфликта разнонациональных законов различные коллизионные принципы и привязки. Эта позиция находит поддержку и в советской литературе по международному морскому частному праву.
В связи с ратификацией и присоединением к Международной Конвенции 1957 года некоторых государств и вступлением ее в силу с 1 мая 1968 г. судебная практика многих стран при решении проблемы права, применимого к ограничению ответственности судовладельцев, возможно, изменится. Дело в том, что ст. 7 конвенции, определяющая сферу ее применения, устанавливает, что конвенционные правила будут применяться всякий раз, когда судовладелец потребует ограничения своей ответственности в суде одного из договаривающихся государств. Эта норма дает некоторые основания для ее толкования как содержащую привязку «закон суда». Однако изменение позиции судебной практики той или иной страны — участницы Конвенции 1957 года в отношении коллизионных принципов, применимых к ограничению ответственности, будет зависеть, по нашему мнению, от многих факторов, которые нельзя не учитывать. Во-первых, позиция судебной практики будет зависеть от порядка введения правил конвенции во внутреннее законодательство той или иной страны, то есть от того, установит ли оно коллизионную привязку «закон суда» для решения вопроса об ограничении ответственности судовладельца или нет. Думается, что, например, морские законы Скандинавских стран дают основания предполагать, что судебная практика этих стран перейдет на позицию закона суда. Так, в Морском кодексе Швеции указано, что гл. 10 «Об ограничении ответственности судовладельца» применяется в случаях, когда об ограничении ответственности заявляется шведским властям.
Возможность изменения позиции и направление такого изменения будут зависеть, во-вторых, от традиций судебной практики той или иной страны в отношении решения коллизионного вопроса об условиях возложения ответственности при столкновении судов на море и ограничении ответственности судовладельца. Так, известно, что голландские суды склонялись, как правило, к тому, чтобы решать как вопрос об условиях возложения ответственности за столкновение, так и проблему ограничения ответственности по одному и тому же закону, а именно по закону места столкновения.
Можно было бы предполагать, что позиция судебной практики Голландии изменится в связи с присоединением этой страны к Конвенции 1957 года. Правила этой конвенции были введены в действие в Голландии Законом от 3 июня 1965 г., после чего были внесены соответствующие изменения в Торговый кодекс Нидерландов. Такого изменения в позиции судебной практики, однако, не произошло.
В решении от 24 июня 1966 г. (вынесенном после присоединения Нидерландов к Конвенции 1957 г.), по делу о столкновении в турецких водах греческого и норвежского судов, Апелляционный суд Гааги отверг принцип lex fori, примененный судом Роттердама, ссылавшимся на Конвенцию 1957 года, и признал компетентным для решения проблемы ограничения ответственности судовладельца закон места столкновения. Вывод суда Роттердама подверг также критике с позиции защиты принципа закона6места столкновения голландский юрист Р. Д. Коллевийн(6).
В законодательстве и судебной практике отдельных государств применяются различные коллизионные принципы и привязки в зависимости от того, произошло ли столкновение в территориальных водах какого-либо государства или такое столкновение имело место в открытом море.
Судебные органы некоторых государств принимают во внимание при определении применимого права и то обстоятельство, являются ли столкнувшиеся суда однонациональными или разнонациональными. Критерий общего флага судов учитывается при решении коллизионного вопроса также законодательствами ряда государств.
В современном мире термин «человеческий фактор» воспринимается как нечто негативное, то, что несет угрозу. Но ведь именно благодаря человеческому фактору возможен прогресс. К примеру, прогресс в области технологий позволяет принимать более эффективные управленческие решения в тех отраслях, где интенсивность процессов существенно возросла.
Николай Григорьев, профессор кафедры технических средств навигации ГУМРФ имени адмирала С.О. Макарова
Аргументы в защиту человеческого фактора
Более того, как справедливо заметил британский ученый Альфред Норт Уайтхед: «Цивилизация движется вперед путем увеличения числа операций, которые мы можем осуществлять, не раздумывая над ними». Где-то работа, доведенная до автоматизма, увеличивает производительность и снижает риски от неправильных действий. Человеку, которого все чаще называют общим термином «оператор», отводится роль стороннего наблюдателя.
Современные технологии нашли самое широкое применение в области мореплавания. Сегодня, принимая во внимание резко возросший уровень интенсивности судоходства, размеры судов и их скорости, районы плавания, которые ранее представлялись как абсурдные с точки зрения безопасности мореплавания в зависимости от сезона, без передачи целого ряда функций навигационным автоматизированным системам уровень аварийности вырос бы многократно.
Таким образом, высокий уровень влияния человеческого фактора на уровень аварийности следует рассматривать в контексте готовности и способности человека по своим профессиональным и психофизиологическим качествам принимать ответственные управленческие решения в совокупности с теми данными, которые ему предоставляют современные технические средства.
Человеческий фактор можно охарактеризовать как функцию множества переменных. В целом под человеческим фактором понимается интегральная характеристика человека (или коллектива) как субъекта профессиональной и трудовой деятельности, которая включает в себя параметры профессионально важных качеств (ПВК), психических состояний работника (адаптации, утомления, интерференции навыков, конечного порыва, фрустрации, напряженности и т.д.), движущих сил поведения (мотивов, интересов, отношений) и других социально-ролевых функций (формальных и неформальных), предусмотренных штатным положением и обусловленных личностными свойствами субъекта деятельности или особенностями конкретной ситуации.
На принятие управленческих решений оказывает влияние объем предоставляемой информации, который зачастую носит избыточный характер. А в силу ограниченности человека в способности перерабатывать большое количество информации (от 5 до 9), учитывая ограничение во времени при отборе наиболее важной вследствие динамики замены информации одной на другую и ее осмыслении, человек попадает в жесткие временные рамки.
Модели аварийности
Стремление отыскать некую закономерность в причинах, которые ведут к авариям и катастрофам, породили несколько моделей причинно-следственной зависимости.
Наиболее известны модели – пирамида В.Х. Хайнриха (Heinrich Pyramid) (1931 г.) и «швейцарский сыр» Джеймса Ризона (Reason’s Swiss Cheese Model) (1990 г).
Согласно модели аварийности Хайнриха, катастрофе предшествует череда происшествий, прежде всего это инциденты, которым не придали значения (до 300), значительные поломки и промахи персонала (29), и, наконец, вершину пирамиды «венчает» крупная авария или катастрофа. Встречаются модификации пирамиды Хайнриха, где числовой ряд начинается с 3000 и даже с 30 000 и доходит до 1 (рисунок 1).
Рис. 1. пирамида Хайнриха

У этой модели есть уязвимое место – как объяснить катастрофы, подобные «Титанику», когда самое современное по тем временам судно гибнет в первом же рейсе? Случай в мировом судоходстве далеко не единственный. Аналогичные ситуации встречаются в авиации и в космонавтике.
Есть объяснения трагедии «Титаника» с позиции пирамиды Хайнриха, но они не выдерживают серьезной критики, так как подобные аварии происходят в результате действий других людей, которые не имели прямого отношения к предыдущим происшествиям, поскольку их не объединяет единый функциональный цикл. Включать в причины аварии инциденты, не влияющие на конструктивные характеристики судна, при постройке судна и его эксплуатации нелогично – «в огороде бузина, а в Киеве дядька».
Джеймс Ризон придумал остроумную метафору для череды ошибок, ведущих к катастрофе: «Каждая дырка в ломтике – отдельная ошибка. Таких «дырок» много в любой системе на каждом из уровней, они находятся в разных местах и обладают разной степенью потенциальной разрушительности. Однако следующий уровень-ломтик, в котором нет проблемы на том же месте, защищает всю систему от эпик фейла» (если fail – обычная неудача, невезение, то epic fail – это что-то гораздо более трагическое и масштабное, в рассматриваемой ситуации – катастрофа).
Эта метафора хорошо известна специалистам в области риск-менеджмента и нашла применение в авиации, здравоохранении и инженерии (рисунок 2).
Рис. 2. Модель «швейцарского сыра» Джеймса Ризона

Суть модели сводится к тому, что к аварии приводит целый ряд обстоятельств, которые совпадают во времени и в пространстве. Спора нет, метафоры метко подмечают суть проблем: «Знал бы, где упадешь, то соломки бы подстелил». Однако метафора при всей ее лаконичности не может претендовать на научность оценки.
Судно – это динамическая система, поведение которой можно представить системой дифференциальных уравнений. В общем случае это система нелинейных уравнений, но в определенных ситуациях можно ограничиться и линейной системой и при этом возможно предсказать поведение динамической системы. При резких маневрах судна динамика его поведения становится нелинейной и, следовательно, непредсказуемой. По этому поводу Фритьоф Капра в «Паутине жизни» пишет: «Еще одно свойство нелинейных уравнений, которое всегда смущало ученых, заключается в том, что точное предсказание часто бывает неосуществимо, даже если уравнения строго детерминированы. Эта поразительная особенность нелинейности обусловила важный сдвиг акцента от количественного анализа к качественному».
При расследовании аварий эксперты руководствуются линейной динамикой судна и готовы проследить всю динамику происшествия, в то время как события развиваются в подавляющем большинстве случаев нелинейно. Моряки это давно подметили: «когда в море пожар, то на берегу дают много мудрых советов».
Матрица аварийности
Предлагаю иную модель аварийности, которая базируется на системе дифференциальных уравнений, описывающих поведение системы «судно (судовое оборудование) – человек – внешние воздействия».
Порядок такой системы будет весьма высоким. Оно и понятно: отображая всю полноту динамики судна, нельзя ограничиваться системой второго порядка, принимая за переменные механизмы как нечто единое в том числе и самого человека. Рене Декарт говорил: «Я рассматриваю человеческое тело как механизм». Коэффициенты, включенные в левую часть системы уравнений и отображающие состояние человека, его физические и психофизиологические параметры, будут наиболее динамичными. Именно этой динамике будет принадлежать решающее значение при приеме управленческих решений – их качество.
Матрица аварийности находится в состоянии динамического равновесия до тех пор, пока совокупность внутренних и внешних факторов не выйдет за рамки линейности. Переход от линейной системы к нелинейной ведет к состоянию бифуркации.
Термин «бифуркация» характеризует поведение многофункционального динамического объекта (каковым является и современное судно) в сложных, неравновесных состояниях; поведение, которое нельзя описать системой линейных дифференциальных уравнений, обусловленных как состоянием самого судна, так и условиями внешней среды.
Состояние динамического равновесия судна может быть описано системой линейных дифференциальных уравнений, где левая часть описывает как внутреннее состояние системы и включает в себя исправно функционирующее состояние судовых систем и механизмов, так и состояние человека, ответственного за принятие управленческих решений, со всеми его физическими и психофизиологическими параметрами. А правая часть – это совокупность внешних воздействий, которые способны повлиять на поведение судна, выводя его из состояния устойчивого динамического равновесия. Утрата устойчивости системы ведет к бифуркации – переходу от линейной системы уравнений, описывающих поведение судна, в область нелинейности.
Современный мир полон ситуаций, таящих потенциальную аварийность, и только благодаря тому, что причинно-следственные зависимости между событиями имеют длительность во времени, эти ситуации не завершаются авариями.
Существует множество причин, способствующих аварийности, когда определитель из коэффициентов левой части уравнения стремится к нулю.
Из перечисленных причин, влияющих на состояние динамики коэффициентов по причине человеческого фактора, не последнее место занимает усталость.
На основании исследований, выполненных среди моряков по программе влияния усталости, ясно, что проблемы со здоровьем нарастают нелинейно. При наличии 1-2 факторов усталости риски увеличиваются вдвое, а при наличии 7-8 факторов усталости это число возрастает в 30 раз. (The Cardiff Seafarers’ Fatigue Programme (Smith, Allen and Wadsworth, 2006.) А по данным the New Zealand Maritime Report (Gander, 2005), 25% моряков ощущали усталость по крайней мере в половине своих последних рейсов.
Н.К. Рерих в статье «Безумия» приводит такие факты: «В Университете Виргинии профессор Гарри М. Джонсон говорил о последствиях усталости: «Если вы устали – вы безумны». «Усталый человек выкажет характерные симптомы той или иной формы безумия и не всегда в малой степени», – сообщал доктор Джонсон, излагая результаты своих семилетних исследований в Институте Мелон. Неповоротливость, невнимательность, расстройство речи, провалы памяти, упрямство и болезненное упорство, галлюцинации, потеря сознания, блуждание и припадки гнева – все это обычные симптомы усталости, если даже они начинаются в большой постепенности». А причин, как положительных, так и отрицательных, таящихся в термине «человеческий фактор», оказывающих влияние на поведение человека и на принятие им управленческих решений, – великое множество.
Применительно к вопросам безопасности мореплавания все это многообразие параметров человеческой психики, включенное в систему дифференциальных уравнений, отображающих поведение динамической системы «судно – человек – внешние воздействия», сохраняет линейный (предсказуемый) характер поведения или переходит в состояние нелинейности (непредсказуемости). Такой переход обусловлен главным образом стабильностью или нестабильностью физических и психофизиологических параметров человека, принимающего управленческие решения. Таким образом, причина аварийности кроется в определителе, составленном из коэффициентов левой части системы дифференциальных уравнений. Если определитель системы стремится к нулю, то это ведет к аварии или катастрофе – 1 (рисунок 3), если же определитель «далек» от нуля, то это происшествие попадает в разряд «инцидентов, которым не придали значения» – 2. Промежуточное состояние определителя – «мелкие аварии» – 3.
Рис. 3. Матрица аварийности

Таким образом, пирамида Хайнриха может «сработать», и это будет подтверждением ее объективности, но может и дать сбой, как это бывало множество раз, и тогда начинаются поиски черного кота в темной комнате.
Американский капитан Ричард А. Кейхилл, автор книги «Столкновения судов и их причины», в качестве эпиграфа взял высказывание: «Незаурядный моряк использует свою незаурядную рассудительность, чтобы избежать ситуаций, требующих его незаурядного мастерства».
Принимая за основу матрицу аварийности как инструмент, характеризующий динамику событий, это высказывание можно перефразировать так: незаурядный моряк должен использовать свою незаурядную рассудительность, чтобы избежать ситуаций, когда система дифференциальных уравнений описывает динамику перехода триады «судно (судовое оборудование) – человек – внешние воздействия» из линейной системы дифференциальных уравнений в нелинейную систему.
Такой переход носит скачкообразный характер, который и ведет к аварии. Это можно пояснить на житейском примере. Двигаясь навстречу друг другу, два человека сталкиваются, хотя причин для этого вроде бы и не было, ведь они прекрасно ориентировались в пространстве и прогнозировали развитие ситуации. При наступлении «скачка» происходит переход от линейной (прогнозируемой) ситуации к нелинейной (непрогнозируемой). Итог – «авария».
Выводы
Только комплексный подход к проблемам, учитывающий все ключевые компоненты, входящие в динамику безопасности мореплавания, будет способствовать снижению аварийности. Причем человеческому фактору, как наиболее динамичной компоненте, следует уделять самое пристальное внимание.
Когда смотришь на схемы маневрирования столкнувшихся судов, охватывает чувство недоумения. Почему суда поворачивают друг от друга? Ведь «море большое», место для маневра предостаточно. Что происходит с человеком-моряком, управляющим судном, непосредственно перед столкновением и после него? Вот некоторые факты.
М. Муравицкий, штурман, старший лейтенант запаса ВМФ
• Танкер «Механик Афанасьев» Новороссийского пароходства.
• Рефрижераторный теплоход «Кура» Латвийского морского пароходства.
31 октября 1976 г. Поворот на курс 239 у буя №4 у острова Соммерс. Около 7 часов утра рулевой сообщил старшему помощнику о траверзе буя, но, не будучи предупрежденным о повороте, продолжал удерживать курс 284. Старший помощник подтвердил получение доклада, но команды о повороте не отдал. В 7 часов 10 минут теплоход «Кура» на полном ходу сел на каменистую отмель острова Соммерс, получив тяжелые повреждения подводной части корпуса. Судно из-за тяжелых штормовых условий спасти не удалось.
• Ледокольный паром «Северодвинск» Эстонского морского пароходства работал на Моонзундском проливе 2 декабря 1975 г. . Особенностями плавания подобных паромов является то, что они совершают ежесуточно до 20 рейсов каждый. Находясь в рубке. не заметил, как проскочил точку поворота, не понял, что судно стремительно приближается к опасности. Получив серьезные повреждения корпуса, паром надолго выведен из эксплуатации.
• Столкновение пассажирского теплохода «Адмирал Нахимов» и сухогруза «Петр Васев».
Капитан сухогруза наблюдает на экране РЛС сближение двух отметок при постоянстве пеленга, их слияние в одну, слышит доклад об опасности столкновения и никаких мер не принимает. Достаточно было дать любую команду: на уменьшение хода, на увеличение хода, на изменение курса вправо или влево, и столкновения, огромных человеческих жертв не было бы. Но капитан сухогруза оказался в состоянии прострации, поэтому никаких действий не предпринял.
Вероятность столкновения двух судов в открытом море может быть вычислена как совпадение их курсов и скоростей. Вероятность совпадения скоростей для одного судна вычисляется как Pv = (1 уз :10 уз), где скорость изменяется в пределах 0 до 10 уз. Так как события совпадения скоростей двух судов являются независимыми, то умножаем Pv.
Тогда Pvv = (1 уз : 10 уз) 2 для двух судов.
Аналогично для курса Рк = 1° : 360° и для двух судов Ркк = (1° : 360°) 2 .
Таким образом, получаем Р столкн. = Pvv х Ркк = (1° : 360°) 2 х (1 уз : 10 уз) 2 = 10 -7
Вероятность столкновения двух судов в открытом море составляет одну десятимиллионную. Данная задача вычислена без учета человеческого фактора, т.е. для случая, когда учитывается только объективный фактор – суда существуют и движутся курсами и скоростями.
Отсюда вывод: «Человеческий фактор – основная причина столкновения судов».
Согласно данным статистики за 27-летний период с 1947 по 1973 год, когда Ливерпульская ассоциация страховщиков перестала публиковать подобные статистические данные об аварийности мирового морского флота, ежегодно терпит аварию в результате столкновения в среднем каждое пятнадцатое судно (учитывались суда валовой вместимостью больше 500 регистровых тонн).
Спецгруппа по исследованию причин аварий судов норвежского регистра судоходства пришла к выводу, что 85% столкновений судов и посадок на мель обусловлено личными ошибками судоводителей, которые могли быть следствием влияния социальных факторов, болезни, рабочих условий на мостике, а также эргономических факторов.
По данным Береговой охраны США, 80% всех аварий танкеров также произошли вследствие ошибок судоводителей. Такой процент аварийности (80%) указывает М.М. Цветков в диссертации «Исследование транспортной системы».
Статистическая обработка столкновений судов МРФ за 15-летний период методом построения матрицы событий говорит о том, что среднее время от момента обнаружения цели до столкновения составляет 7 минут. Времени для маневра предостаточно. Кроме того, анализ гидрометеоусловий, в которые произошли столкновения, показывает, что 80% аварий случились в условиях размытого поступления информации (туман, ночь, дождь, снежные заряды).
Польский ученый Ольховы установил, что при размытом поступлении информации (либо ее недостатке, либо при ее чрезмерном избытке) человек-судоводитель начинает строить схемы предвидения, т.е. пытается предугадать ситуацию. Чем больше схем предвидения, тем больше чувство страха.
Страх столкновения – это постоянный производственный раздражитель судоводителя. При каждом опасном сближении судов, при ночном плавании, при входе в туман, при прохождении узких мест, при каждой швартовке импульсы страха поступают в мозг судоводителя.
В каждом конкретном случае судоводитель преодолевает страх волевым усилием, но постепенно, с годами, в его психике формируется комплекс страха аварии.
О сильных эмоциях страха непосредственно перед столкновением говорит также хриплый голос (спазм голосовых связок), неправильно поданные команды, нарушение логики действий.
Появление комплекса страха аварий приводит к следующему:
1. Агрессивные люди, попадая в аварийную ситуацию, поворачивают на источник опасности. Поэтому можно говорить о притяжении страхом.
2. Уравновешенные люди действуют логично и хладнокровно, принимая грамотное решение на маневр.
3. Люди с истощенной психикой впадают в шок, ступор, прострацию.
Таким образом, можно сказать, что комплекс страха аварии является основной причиной столкновения судов.
Какие меры следует предпринять для уменьшения количества столкновений?
Уже одно только знание о существовании подсознательного комплекса страха аварии способно сыграть положительную роль в жизни судоводителя.
Уменьшить количество столкновений могло бы следующее нововведение в МППСС-72.
Суда, совершающие поворот, обязаны сигнализировать об этом упреждающим сигналом. Таким сигналом может быть использование светоимпульсной отмашки (применяется на речных судах для указания расхождения со встречными судами) и (или) переведение судового огня стороны поворота кормового огня в мигающий режим. Подача упреждающего сигнала за минуту до поворота позволит увеличить время принятия решения на 2-2,5 минуты.
Следует также включить в МППСС-72 понятие «маневр последнего момента». Так, при уменьшении расстояния между судами до 5 кбт оба судна обязаны отвернуть в сторону, противоположную пеленгу, на цель, с которой происходит опасное сближение.
Так, при курсовых 0 до 180 левого борта поворот осуществляется вправо, а при курсовых угла цели 0 до 180 правого борта поворот осуществляется влево. При этом правило должно распространяться на оба сблизившихся судна, т.е. при сближении 5 кабельтовых перестает действовать понятие о привилегированном судне, обязанном сохранять курс и скорость.
Конечно, комплекс страха аварии для командиров и штурманов ВМФ проявляется в меньшей степени в силу их большей волевой и психологической устойчивости. Но анализ столкновений кораблей и подводных лодок, проведенный главным штурманом ВМФ контр-адмиралом А.Н. Мотроховым, говорит о том, что командиры при столкновении тоже теряются. Кроме того, график зависимости количества столкновений от возраста командиров, попавших в аварию, имеет такую же форму, как и у судоводителей МРФ.
Несомненно одно – человеческий фактор при столкновении является определяющим. Решение проблемы столкновения судов находится в области интеллектуальной деятельности человека-моряка.
На основании проведенных исследований причин столкновения п/х «Адмирал Нахимов» с т/х «ПетрВасев» и других столкновений крупнотоннажных судов при использовании САРП можно сформулировать рекомендации судоводителям по их предупреждению.
К использованию САРП должны допускаться только судоводители, отвечающие за ходовую вахту, прошедшие специальную подготовку и имеющие соответствующие удостоверения.
Судоводители должны уметь производить проверки, указывающие на нормальную работу САРП, определять и знать поправки и погрешности навигационной информации (формуляра и векторов), помня, что чрезмерное доверие к информации САРП - опасно, особенно при расхождении крупнотоннажных судов на пересекающихся курсах под острыми курсовыми углами, когда погрешности САРП достигают максимальных значений.
При движении судов в одном направлении с небольшой разностью скоростей относительная скорость и перемещение объекта, определяемые САРП, являются менее всего достоверными, а изменения курса маскируются и могут быть замечены с большим опозданием и с большими погрешностями. Погрешности САРП возрастают при качке, волнении, дожде и снегопаде. Возможны потери объектов и необнаружение объектов со слабыми отраженными сигналами. При сближении объектов на небольшие расстояния или при крупном волнении может происходить «обмен» объектов (переход строба сопровождения на отметку волны или другое судно). Критериями нормальной работы САРП, кроме указанных в инструкции по эксплуатации, являются: стабильность траектории движущегося объекта и быстрое распознавание перемещения его отметки на экране САРП, а также отсутствие разности показаний одних и тех же величин в режимах ЛИД и ЛОД. Появление у неподвижных объектов векторов в режиме работы САРП ЛИД при одинаковых показаниях абсолютного и относительного лагов (отсутствует течение) указывает на наличие ошибок в системе сопровождения. Судоводители должны, руководствуясь правилами 5 и 7 (а), (b) МППСС-72, дополнять и контролировать информацию САРП во время расхождения судов визуальным и слуховым наблюдениями, визуальными и радиолокационными пеленгами, радиолокационной прокладкой, а при необходимости и информацией о параметрах движения и расхождения приближающегося судна, получаемой от него по радиотелефону. Во избежание ошибок в интерпретации информации САРП судоводители должны знать возможности режимов работы ЛОД и ЛИД, закономерности изменения пеленгов и возможности необнаружения их при расхождении на пресекающихся курсах и небольших величинах Дкр.
Автоматическая радиолокационная прокладка при расхождении судов с использованием САРП должна иметь целью решение трех основных задач:
1. Своевременного определения опасности столкновения с приближающимся судном в соответствии с требованиями правила 7 МППСС-72;
2. Своевременного выбора мер (действий) для предупреждения
столкновения судов или вида маневра в соответствии с требованиями
правила 8, а также правил 13 (обгон), 14, 15, 17 (а), (и), 18 (а), когда суда
находятся на виду друг у друга, и правила 19 МППСС-72 при плавании
судов при ограниченной видимости; .
3. Определения момента начала маневра для предупреждения столкновения судов в соответствии с требованиями правила 16 для судна, уступающего дорогу, и правила 17 (о) МППСС-72 для судна, которому уступают дорогу.
Для решения перечисленных задач и обеспечения безопасного расхождения судов предварительная автоматическая радиолокационная прокладка должна включать следующие операции:
1. Автоматическое и визуальное обнаружение движущихся объектов-целей в зоне, окружающей судно.
2. Автоматическое и ручное взятие на автосопровождение отметки объекта, что достигается в момент пересечения отметкой охранного кольца, устанавливаемого судоводителем на выбранной дальности (больше 10 м.м.). При ручном захвате на автосопровождение маркер совмещается с центром отметки и рядом с маркером появляется символ (знак) сопровождения. При автосопровождении происходит непрерывное изменение пеленга и дистанции приближающегося судна;
3. Автоматическое определение параметров движения (скорости и курса) приближающегося и своего судов и выработка векторов перемещения через одну минуту после начала сопровождения;
4. Автоматическое определение параметров расхождения судов - дистанции Дкр и времени tкр, кратчайшего сближения (через 2-3 мин после начала сопровождения) и получение цифрового формуляра цели, включающего относительные координаты судна-цели (пеленг, дистанция), его курс, скорость, дистанцию кратчайшего сближения и время кратчайшего сближения судов.
5. Определение характера расхождения при условии сохранения скоростей и курсов обоими судами (по носу или корме пройдет наше судно у приближающегося судна), что достигается прогнозом движения судов (увеличением длины ЛОД) на время, не меньше, чем величина tкр, и независимо от него наблюдениями за изменениями пеленгов на приближающееся судно. Определение характера расхождения производится только в относительном режиме работы САРП (режим ЛОД).
Если ЛОД пересекает отметку (линию) курса и пеленг заметно изменяется в сторону носа судна, то приближающееся пройдет по носу; если ЛОД не пересекает отметку (линию) курса и пеленг заметно изменяется в сторону кормы, то встречное судно пройдет по корме; если ЛОД проходит по центру экрана или вблизи его, и пеленг не изменяется или изменяется незначительно, то существует угроза столкновения судов.
Располагая достоверной информацией о направлении заметного изменения пеленгов, о положении ЛОД в отношении центра экрана (отметки нашего судна) и отметки курса судна, о величинах Дкр и tкр, судоводитель принимает решение об отсутствии или наличии опасности столкновения, руководствуясь правилом 7 МППСС-72. Следует отметить, что правило 7 (а) при определении наличия опасности столкновения требует, прежде всего, учитывать характер изменения или постоянство пеленгов. В открытом море безопасным можно считать расхождение, если САРП показывает Дкр больше или равно 2 м.м, в местах с интенсивным движением судов - при Дкр больше или равно 1 м.м, если пеленги заметно изменяются.
Если опасность столкновения судов не существует, то на этом предварительная автоматическая радиолокационная прокладка заканчивается, и режим работы САРП рекомендуется перевести с ЛОД на ЛИД, так как необходимый контроль за поведением приближающегося судна по положению векторов его истинного движения более точен и эффективен. Необходимо учитывать, что приближающееся судно может не иметь САРП и даже РЛС и скорость обработки навигационной информации у него может быть недостаточной для правильной оценки ситуации расхождения. В этом случае ускоренная радиолокационная прокладка может быть произведена в течение не более 1 мин, если по радиотелефону от приближающегося судна будет получена информация о пеленге (ИП), дистанции (Д), его скорости (V) и курсе (ИК). После чего, отложив от центра маневренного планшета, как показано на рис. 13, Дкр = 0,5 м.м. Следует учитывать и возможность потери управляемости судна во время расхождения из-за отказов рулевого устройства, обесточивания или отказов в энергетической установке. В практике судовождения имеется ряд аварий, указывающих на то, что в перечисленных случаях при расхождении на Дкр = 0,5 м.м. крупнотоннажным судам предотвратить столкновение не удалось, и последствия столкновения были очень тяжелыми. Судоводителям рекомендуется избегать расхождения Дкр = 0,5 м.м.
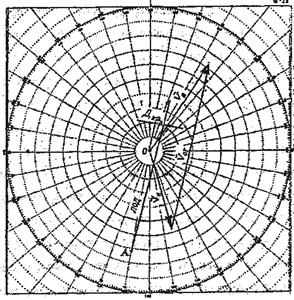
Рис. 13. Пример радиолокационной прокладки п/х «Адмирал Нахимов», которая могла быть выполнена по информации «Петр Васев», полученной по радиотелефону
О – п/х «Адмирал Нахимов» в 22.47; А - т/х «Петр Врсев» в 22,47;VВ - вектор скорости т/х «Петр Васев» - 11,3 уз; Vh - вектор скорости п/х «Адмирал Нахимов» - 9уз; Vот - вектор скорости относительного движения; Дкр, - дистанция кратчайшего сближения
Если опасность столкновения существует, тоавтоматическая радиолокационная прокладка продолжается с целью определения мер по предупреждению столкновения или вида маневра и определения момента начала маневра. Автоматическая прокладка на этой стадии позволяет для ситуации расхождения, когда существует опасность столкновения, определить в ускоренном масштабе времени новые параметры безопасного расхождение (Дкр и tкр) при выбранном судоводителем уступающего дорогу судна маневре. В результате этой шестой операции автоматической радиолокационной прокладки, которая получила название «Проигрывание маневра», судоводитель получает от САРП информацию о безопасном расхождении судов при выбранном маневре.
В соответствии с требованиями правила 8 (б) для предупреждения столкновения должен быть выбран один из следующих маневров: маневр курсом (отворот на несколько десятков градусов) или маневр скоростью подтормаживание (уменьшение скорости до самого малого хода), пассивное торможение (остановка главного двигателя), активное торможение. Наиболее целесообразным, эффективным и распространенным видом маневра при расхождении является маневр курсом. Маневр скоростью рекомендуется применять в тех случаях, когда маневр курсом по той или иной причине применить невозможно из-за наличия навигационной опасности, помех от других судов, при следовании крупнотоннажного судна в море по глубоководному фарватеру, и в других случаях. При этом маневр подтормаживания применяется только в тех случаях, когда в процессе расхождения требуется сохранение управляемости судна, например, из-за действия бортового ветра или сноса от течения. Маневр пассивного торможения применяется, когда перечисленные факторы отсутствуют, но при работе двигателя на задний ход судно имеет значительное уклонение от линии курса (3-4 кб), что при данных условиях недопустимо, например, из-за угрозы посадки на мель. В остальных случаях должно быть применено активное торможение, с работой двигателя на полный задний ход. Начало выбранного маневра скоростью крупнотоннажных судов должно производиться по безопасной дистанции, определяемой по трехмерному графику, аналогичному рис. 10-12. Выбору маневра предшествует установка на индикаторе САРП времени запаздывания маневра tзап, необходимого для подготовки к выполнению маневра. При выборе направления поворота при маневре курсом рекомендуется отдавать предпочтение повороту под корму судна, которому уступают дорогу.
Определение величины угла поворота производится во многих САРП в результате автоматической прокладки маневра, обеспечивающего заданную судоводителем Дкр. Время запаздывания маневра принимается равным 1-6 мин. После осуществления выбранного маневра курсом следует осуществить новую автоматическую радиолокационную прокладку, чтобы убедиться в адекватности проигрываемого и реального маневров (седьмая операция).
Заканчивается автоматическая прокладка восьмой операцией - исполнительной автоматической радиолокационной прокладкой траектории движения судна, которому уступают дорогу, с целью контроля его движения. При этом САРП должен быть включен в режиме ЛИД. Аналогично производится и контроль за движением других судов, угроза столкновения, с которыми ранее не существовала.
Если для крупнотоннажного судна, которому уступают дорогу, становится очевидным, что столкновения нельзя избежать только действиями уступающего дорогу судна, то оно должно в соответствии с правилом 17 (a) (ii) и (Ь) начать маневр отворота с перекладкой руля на борт в сторону, противоположную грозящей опасности, на дистанции между судами не менее 1,5 мили.
Вахтенный помощник капитана является представителем капитана и постоянно несет главную ответственность за безопасное плавание судна и соблюдение Международных правил предупреждения столкновений на море 1972 года (ПДНВ-78/95. Глава VIII. Часть 3.1. Принципы несения ходовой навигационной вахты).
Вахтенный помощник капитана (ВПКМ), только что закончивший учебное заведение, может знать цели, содержание и теоретическое применение Правил.
На первом этапе своей деятельности от ВПКМ требуется правильно опознавать цели и оценивать опасность чрезмерного сближения с ними. При возникновении опасности столкновения или малейшего сомнения в этом – немедленно вызывать капитана на мостик. Экстренный вызов капитана на мостик, если он не отвечает на телефонный вызов, осуществляется подачей одного короткого звонка (2 – 3 сек) кнопкой общесудовой тревоги.
Второй этап – это этап глубокого понимания и применения Правил, который достигается накоплением личного опыта в течение длительного времени на судне. На этом этапе ВПКМ должен научиться анализировать развивающуюся ситуацию и, если необходимо, уметь самостоятельно предпринимать действия для избежания чрезмерного сближения или столкновения с другими судами.
Единственной причиной столкновений судов является неправильная оценка вахтенным помощником создавшейся ситуации – так называемый «человеческий фактор». Частота аварий в течение рейса распределяется следующим образом:
- выход из порта – 40,0%;
- вход в порт – 27,0%;
- в рейсе – 33,0%;
- причем 59,0% столкновений происходит в районах лоцманской проводки, а 40,0% столкновений с лоцманом на борту. Более 2/3 от общего числа столкновений судов происходит в условиях ограниченной видимости.
Международные правила предупреждения столкновений на море (МППСС-72)
МППСС – основной документ, определяющий принципы безопасного расхождения судов. Правила обязывают каждое судно нести огни и знаки, подавать звуковые сигналы, использовать все средства в соответствии с преобладающими обстоятельствами и условиями с тем, чтобы это позволило каждому из них:
- заблаговременно обнаружить присутствие других судов;
- определить степень опасности столкновения;
- учесть взаимные обязанности при маневрировании по расхождению;
- обеспечить безопасное расхождение при любых условиях видимости. Требования МППСС распространяются на все происшедшие столкновения, в которые вовлечены суда (судно – судно, судно – буй, судно – нефтяная платформа).
Текст МППСС состоит из 5 частей, 4 приложений и «Руководства по единому применению некоторых правил МППСС-72». Из структуры МППСС видно (рис. 1), что каждая часть содержит разное количество Правил – от одного (Часть Е) до шестнадцати (Часть В).
Часть В включает в себя 3 раздела и содержит Правила, которые определяют маневрирование судов в зависимости от состояния видимости. Правила этой Части каждый судоводитель должен отлично знать, понимать и применять.
Приложение I дополняет Часть С (Огни и знаки); Приложение II – Правило 26 (Рыболовные суда); Приложение III уточняет Часть D и его 6 правил, а Приложение IV расширяет Правило 37 в части “Сигналы бедствия”. «Руководство…» дополнительно разъясняет некоторые термины, определения и взаимосвязь Правил и разделов Части В.
Общая концепция МППСС-72
Правила рассматривают только последовательное расхождение двух судов.
В Правилах рассматривается расхождение судов при разных навигационных условиях плавания:
- в открытом море;
- в узкости;
- в системе разделения движения.
В Правилах учитывается состояние судов и их взаимные обязанности при расхождении:
Автор статьи

Читайте также:
- Является ли прием на государственную службу предметом административно правового регулирования
- Возможна ли организация многопользовательской вкс в системе нестор правосудие
- Реализация на практике принципа разделения властей правовое государство
- Гражданин с на основании решения суда обязан уплатить штраф какая дополнительная информация позволит
- В каком труде ф прокопович проводит мысль что государь сам имеет право назначать преемника