
Особенности управляемости судов и составов
Обновлено: 01.05.2024
Особенности ходкости и управляемости судов внутреннего плавания
В учении о ходкости и управляемости судов являющемся составной частью теории корабля, рассматриваются задачи обеспечения целена прав ленного движения судов в горизонтальной плоскости.
Под ходкостью понимается способность судна или группы судов объе динеиных в состав, перемещаться с заданной скоростью под действием дви жущей силы, создаваемой обычно судовыми движителями, преодолевая сопротивление среды (воды и воздуха). Управляемость — способность судна двигаться по заданной прямолинейной или криволинейной траектории выбираемой судоводителем.
Эти два навигационные качества совершенно необходимы каждому движущемуся плавучему транспортному средству Хорошая ходкость — способность обеспечивать заданную скорость при минимальной мощности энергетической установки или при заданной мощности развивать максималь ную скорость — является одним из факторов обеспечения высоких технико экономических показателей работы флота. Высокая управляемость необ ходима для обеспечения безопасности плавания судов в различных путевых условиях.
Ходкость и управляемость транспортных средств речного флота отли чаются рядом характерных особенностей от аналогичных качеств морских судов, определяемых прежде всего спецификой путевых условий. На свободных реках составляющих большую часть протяженности внутренних водных путей, суда движутся по мелководному, узкому н извилистому фар ватеру при наличии течения. На водохранилищах, устьевых участках крупных рек, озерах и морских участках суда могут подвергаться действию штормового волнения Наконец, в условиях продленной навигации возни кает необходимость обеспечения ходкости и управляемости транспортных судов при движении. в битом льду.
Специфика путевых условий определила и характерные особенности самих транспортных средств, их движителей и рулевых органов. Большая часть грузов на речном транспорте нашей страны перевозится в толкаемых составах в то время как иа морском флоте толкание не вышло из стадии от дельных экспериментов). Наряду с этим на ряде рек еще применяется буксировка иа тросе несамоходных судов и плотов. Получила значительное распространение перевозка грузов на теплоходах смешанного (река — море) пла вания. Для пассажирских перевозок наряду с традиционными однокорпус ными водризмещающнми судами, эксплуатируемыми в основном на турист ских экскурсионных линиях широко используются суда с динамическими принципами поддержания — глиссирующие, на подводных крыльях и на воздушной подушке, а также водоизмещающие катамараны
Весьма разнообразны н движительно~рулевые комплексы речных судов В качестве движителей наряду с открытыми гребными винтами (которыми оснащено абсолютное большинство морских судов) на речном флоте широко применяйте двйжительные комплексы гребной винт — направляющая насадка, которыми оборудованы практически все буксировщики-толкачи и большая часть грузовых теплоходов. На флоте малых рек находят также применение водометные движители и гребные колеса
Рулевые органы речных судов для обеспечения безопасности плавания в условиях узкого н извилистого судового хода должны обладать значительно большей относительной эффективностью по отношению к рулям морских судов. Находят широкое применение поворотные направляющие насадки и многоперьевые рулевые комплексы за открытыми винтами или гребными винтами в неподвижных насадках. На кильватерных толкаемых составах в ряде случаев применяются изгибающие устройства, меняющие форму состава в плане, а также носовые опускающие рули на передней барже состава. На крупных пассажирских и грузовых теплоходах для облегчения привально-отвальных маневров применяются подруливающие устройства На судах с водометными движителями для обеспечения управляемости используются специальные реверсивно-рулевые комплексы
Все эти характерные особенности находят отражение в курсе ходкости и управляемости судов внутреннего плавания.
Краткий исторический очерк
Первым по времени возникло учение о сопротивлении среды перемеще нию в ней тел Предыстория этого учения связана с воззрениями Аристо теля (IV в до н э.), согласно которым всякое движение требует непрерыв ного приложения к телу внешней среды Такая сила, согласно учению Арн стотел я, возникает за счет смыкания жидкости за телом и приложена к кор мовой оконечности тела.
Эти представления просуществовали до XVII столетия, до работ осново положника высшей математики и классической механики Исаака Ньюто на. Ньютон в своих Математических началах натуральной философии при водит теоретический вывод квадратичного закона сопротивления, как ре акции от удара жидкости о лобовую часть тела. Другая часть сопротивле ния, по Ньютону, происходит от вязкого трения жидкости о поверхность тела. Повышение давления в кормовой оконечности, предсказанное еще Аристотелем, Ньютоном не учитывается. Отсюда следовал парадоксальный вывод о том, что форма кормовой оконечности не влияет на сопротивление тела, что противоречило накопленному к тому времени опыту мореплава ния.
Настоящая история учения о ходкости и управляемости судов началась с работ основоположника теоретической гидромеханики и теории корабля, члена Петербургской Академии наук Леонарда Эйлера (1707 — 1783 гг.). Толчок развитию гидродинамики дало введенное нм представление о жидкости и rase как о сплошных средах. Из полученных Эйлером уравнении гидродинамики идеальной жидкости математическим путем выводится и знаменитый парадокс д’ Аламбера (1744 г.), согласно которому сопротивление при равномерном движении тела в безграничной идеальной жидкости равно нулю. Объяснение парадокса было дано Эйлером, который подчеркнул от личие действительной жидкости обладающей внутренним трением (вяз костью), от идеальной
Леонардом Эйлером были получены и первые уравнения дЬйженйя Суд на по криволинейной траектории, опубликованные в его капитальном труде «Полное умозрение строения и вождения кораблей», русское издание которого датируется 1776 г Это время можно считать началом возникнове ння учения об управляемости судов.
Современник Эйлера Даниил Бернулли получил известное уравнение связи между скоростью и давлением в идеальной жидкости. Им же введен и сам термин «гидродинамика». Со времен Эйлера и Бернулли гидродина мика становится фундаментом учения о ходкости и управляемости судов В свою очередь, необходимость решения задач ходкости в связи с появле нием на флоте паровых двигателей стимулировала развитие гидродинамики
В первой половине XIX столетия трудами О Коши и его последователей создана теория волн малой амплитуды, на базе которой в дальнейшем разви валась теория волнового сопротивления судов Д. Стоксом и другими ис следователями получены уравнения движения вязкой жидкости. В 70-х годах К- Кирхгофом разработана теория произвольного движения тел в идеальной жидкости Трудами У Томсона и Г. Гельмгольца установлены основные закономерности вихревых движений жидкости
Параллельно развивалась и экспериментальная гидродинамика — об щая и судовая. Осборном Рейнольдсом обстоятельно изучены два режима движения вязкой жидкости (ламинарный и турбулентный), установлена роль критерия, носящего его имя, положено начало теории турбулентных движений жидкости. Уильямом Фрудом разработана методика моделирования сопротивления воды движению судов в опытовых бассейнах. Им показано что особенности создаваемой судном системы волн и закономерности волно вого сопротивления зависят от значения относительной скорости (в дальнейшем числа Фруда), дан эмпирический метод расчета сопротивления трения судна и его модели Его сыном Реджимоном Фрудом в конце-90-х годов выявлены основные особенности влияния мелководья на сопротивле ние судов
К 60-м годам прошлого столетия гребной винт становится преобладаю щим типом движителя морских судов. В те же годы У. Ренкином создается первая теория гидрореактивного движителя, оформившаяся позднее (1882 — 1886 гг.) благодаря трудам Н Е Жуковского в законченную теорию Идеального движителя.
Бурный толчок развитию гидро и аэродинамики дало появление ка гра ни XIX и XX столетий авиации. Николаем Егоровичем Жуковским совме стно с его учеником и соратником С. А. Чаплыгиным в 1904 — 1910 гг. за ложены основы теории несущего крыла Эта теория получила дальнейшее развитие в созданной Н. Е. Жуковским вихревой теории гребного винта Людвигом Прандтлем и его сотрудниками (Карман, Никурадзе) разработа на теория пограничного слоя — научная основа определения вязкостного сопротивления судна. Л, Прандтль внес значительный вклад в разработку теории крыла конечного размаха (теория несущей линии)
В 1896 г. австралийцем Мичеллом опубликована первая приближенная теория волнового сопротивления судна. Позднее эта теория использована Г. Е. Павленко дли определения волнового сопротивления корпуса судна заданного теоретическим чертежом, для решения задач о форме судна минимального волнового сопротивлении и о выгодных и невыгодных ско ростях судна. В 30-е годы Н. Е. Кочиным решена задача о волновом сопро тивлении тела произвольной конфигурации, погруженного под свободной поверхностью жидкости. Л. Н. Сретенский распространил решение Мичел ла на случай движения судна на мелководье и в прямоугольном канале 6
Несмотря на последующие успехи теории волнового сопротивления, до настоящего времени основным и наиболее надежным методом его определе ния остаются испытания моделей в опытовом бассейне. На основе результатов систематических модельных испытаний учеными нашей страны созданы методы прогнозирования сопротивления воды движению речных судов и толкаемых составов.
Трудами ряда советских и зарубежных ученых из которых в первую очередь необходимо отметить Н. Н. Полякова и В М Лаврентьева, детально разработаны вихревая теория гребного винта и основанные на ней методы расчета. В то же время на практике широко используются диаграммы для расчетов гребных винтов, построенные по результатам систематических мо дельных испытаний. Удачная форма таких диаграмм предложена в 1934 г Э Э. Папмелем. Диаграммы по типу Э. Э. Папмеля построены в настоя щее время для нескольких серий гребных винтов различной геометрии.
Теория работы гребного, винта в направляющей насадке разработана в 40-е годы В. М. Лаврентьевым. На ее основе под руководством А. М. Басина был разработан метод расчета комплекса винт — насадка по методу эквивалентного винта. В настоящее время этот громоздкий метод вытесняется прямым расчетом по диаграммам типа Э Э Папмеля, построенным для комплексов винт — насадка.
Разработкой вопросов теории и расчета гребных колес занимались в конце 30 х годов М. Я Алферьев и А М Басин. В 1936 — 1938 гг. в Одесском опытовом бассейне В. Н.Шушкнным проведены систематические испытания моделей гребных колес с поворотными плицами, на основе которых разработан атлас диаграмм для практического расчета гребных колес
Вопросами ходкости судов при неустановившемся движении занималась большая группа исследователей. Начвло этому направлению положено в трудах Нордстрема и Г Е Павленко (1928 — 1934 гг.). Из более поздних работ следует отметить труды И. Я. Миниовнча, а также В. И. Небеснова и его учеников. Метод расчета характеристик разгона и торможения речных судов и толкаемых составов с учетом мелководья и течения разработан в на чале 70-х годов
На развитие учения об управляемости судов большое влияние оказали успехи гидро- и аэродинамики, в частности работы Н. Е. Жуковского и его последователей в области теории крыла, а также работы Г. Кирхгофа по теории движения тел в идеальной жидкости. Многие понятия и методы были перенесены в область управляемости судов из аэродинамики воздушных кораблей, особенно дирижаблей (работы К. К. Федяевского и др.).
Наиболее полного развития линейная теория управляемости достигла в 1946 — 1949 гг. в трудах А. М. Басина и К- Дэвидсона. Была получена корректная структура уравнений движения, уточнены основные понятия и выявлены качественные закономерности криволинейного движения судов, с достаточной полнотой изучена теоретическая устойчивость на курсе и разработана теория движения судна, управляемого авторулевым. В то же время линейная теория не могла дать удовлетворительного описания поведения судна при движении по резко искривленной траектории, когда зависимость гидродинамических усилий от кинематических параметров движения имеет ярко выраженный нелинейный характер.
Поворотным моментом, приведшим к созданию современной теории управляемости, явилось появление в конце 50-х годов нелинейной теории управляемости. В основу этой теории были положены результаты систематических модельных испытаний Р Я Першнца, а также применение цирку-ляцнонно-отрывиой теории крыла малого удлинения в работах К К Фе дяевского и Г. В Соболева
Практика речногб судоходства в первую очередь широкое внедрение толкания несамоходных судов, обусловила необходимость углубленного изучения маневренных качеств флота. В связи с этим в последние два деся тилетия советскими учеными на базе нелинейной теории управляемости модельных и натурных испытаний созданы методы расчета управляемости судов и толкаемых составов в речных условиях плавания
Современное учение о ходкости н управляемости судов и составов вну треннего плавания — научная дисциплина, способная решать многие прак тические задачи, жизненно важные для научно обоснованных проектиро вания и эксплуатации судов речного флота
Изучение курса ходкости и управляемости судов преследует три основ ные цели:
выработать у будущего кораблестроителя четкие физические представ ления о сложных явлениях, имеющих место при движении судна (состава) в жидкости, в гидродинамике движителей и рулевых органов о влиянии на движение судна путевых условий;
ознакомить студента с современными методами анализа этих явлений и дать представление о практических способах решения разнообразных задач ходкости и управляемости судов;
подготовить теоретическую базу для прикладных кораблестроительных дисциплин, в первую очередь для проектирования судов
Изложение курса опирается на знания, полученные при изучении выс шей математики теоретической механики и гидромеханики.
Инженер-кораблестроитель, специализирующийся в области проекта роваиия судов, использует знания, полученные им в результате изучения курса ходкости и управляемости, при определении основных характеристик проектируемого судна (главных размерений, коэффициентов полноты, мощ ности энергетической установки), в выборе формы обводов и построения те оретического чертежа, при конструировании движителей, выборе типа и в разработке конструкции рулевых органов. В конструкторских бюро реч ного флота начинает широко внедряться система автоматизированного про ектировання судов (САПР), в которую в качестве неотъемлемых элементов входят подсистемы «Ходкость и движители» и «Управляемость».
Инженерам, работающим на судостроительных и судоремонтных пред приягиях, знание вопросов ходкости и управляемости также необходимо для решения ряда задач при: выборе материалов для покрытия корпу са определении сроков профилактического докования, разработке техно логии изготовления и ремонта гребных винтов и направляющих наса док и т. д
С вопросами обеспечения ходкости и управляемости в производственных организациях приходится сталкиваться и при модернизации флота. Такая модернизация выполняется на судах, проекты которых либо морально устарели, либо не соответствуют условиям эксплуатации в данном бнсеей не. В ряде случаев на находящихся длительное время в эксплуатации судах производится замена главных двигателей, в результате которой необходи мо изменение параметров гребных винтов. Во всех этих случаях невоз можно обойтись без квалифицированных расчетов ходкости и управляемости.
KOHEЦ ФPAГMEHTA КНИГИ

Управляемостью называется способность судна сохранять заданное направление движения, т.е. быть устойчивым на курсе или изменять его по желанию судоводителя под действием руля.
Таким образом, управляемость объединяет два качества судна - устойчивость на курсе и поворотливость.
Устойчивостью на курсе называется способность судна сохранять прямолинейное направление движения в соответствии с заданным курсом.
Поворотливость - это способность судна изменять направление движения и двигаться по заранее выбранной судоводителем криволинейной траектории.
В море на судно, совершающее поступательное движение, оказывают влияние многие факторы: ветер, волнение, течение, неравномерность работы гребных винтов и руля и т.п. их действие трудно поддается количественному учету, но все они стремятся внести возбуждение в режим движения судна.
Практически способность судна держаться па курсе достигается путем периодической перекладки руля. При этом, чем меньше углы перекладки руля и число перекладок в единицу времени, тем большей устойчивостью на курсе обладает судно.
Анализируя понятие устойчивости судна па курсе и требования по ее обеспечению, можно установить, что это качество судна находится в некотором противоречии с другим его качеством - поворотливостью.
Как известно всякое улучшение устойчивости на курсе связано с ухудшением поворотливости и наоборот. Потому при проектировании судна для обеспечения наилучшей управляемости стремятся найти наиболее целесообразное сочетание устойчивости судна на курсе и его поворотливости, соответствующее техническому заданию, т.е. назначению судна и условиям его плавания.
Управляемость судна обеспечивается специальными средствами управления, назначение которых - создавать силу (перпендикулярную ДП), вызывающую боковое смещение судна (дрейф) и поворот его вокруг продольной (крен) и поперечной (дифферент) осей.
Средства управления подразделяются на основные и вспомогательные.
Основные средства - рули, поворотные насадки, крыльчатые движители - предназначены для обеспечения управляемости судна во время его движения.
Вспомогательные средства обеспечивают управляемость судна на предельно малых ходах и при движении по инерции с неработающим г. д. К этой группе относятся подруливающие устройства различных типов, активные рули.
При проектировании рулевого устройства необходимо учитывать назначение судна. Так, суда дальнего плавания проходят значительные расстояния, придерживаясь одного направления, в то время как суда, совершающие частые заходы в порты, а также портовые и другие суда, работающие на ограниченных акваториях, проходят небольшие расстояния при частых реверсах и переменах курса. Очевидно, что для судов первой группы основным требованием является хорошая устойчивость на курсе, а для второй группы - хорошая поворотливость.
Следует подчеркнуть, что для судов, особенно транспортных, сохранение устойчивости на курсе - это фактор, обеспечивающий их экономические показатели, так как плохая устойчивость на курсе непроизвольно удлиняет рейсовое время, которое служит одним из основных эксплуатационных показателей транспортных судов.
ДЕЙСТВИЕ РУЛЯ НА СУДНО
ДЕЙСТВИЕ РУЛЯ НА СУДНО
При движении судна в результате перекладки пера руля на угол α, на нем, под действием потока воды будет возникать результирующая разности давлений со стороны потока на внутреннюю и внешнюю поверхности крыла. Кроме сил давлений на всю поверхность крыла вдоль хорды профиля действуют силы сопротивления, обусловленные вязкостью жидкости.
Результирующие всех сил давления и сил сопротивления можно заменить одной равнодействующей Р, которая называется равнодействующей гидродинамических сил, действующих на крыло. Силу Р принято характеризовать ее проекциями на направление скорости невозмущенного потока и направление, перпендикулярное ему.
Проекция силы Р на направление скорости потока V0 называется лобовым сопротивлением Рх, а проекция той же силы на направление, перпендикулярное скорости потока - подъемной силой Ру .
Очевидно, что сила лобового сопротивления Рх, направленная в сторону, противоположную движению судна, вызывает торможение судна и уменьшение, таким образом, его скорости. Сила Рy направлена перпендикулярно ДП и вызывает на переднем ходу смещение кормы судна влево. Сила Рy - полезная сила, обеспечивающая разворот судна при перекладке руля.
При перекладке пера руля на угол, больший 35°, подъемная сила Ру становится незначительной, а сила лобового сопротивления Рх, уменьшающая скорость судна, увеличивается. Поэтому на практике угол перекладки руля, как правило, не бывает больше 35°.
Практика плавания показывает, что управляемость на заднем ходу всегда значительно хуже, чем на переднем, а во многих случаях суда почти не управляются даже в условиях спокойной воды.
ЦИРКУЛЯЦИЯ СУДНА И ЭЛЕМЕНТЫ ЦИРКУЛЯЦИИ
ЦИРКУЛЯЦИЯ СУДНА И ЭЛЕМЕНТЫ ЦИРКУЛЯЦИИ
Допустим, что судно совершает установившееся прямолинейное движение, причем направление скорости судна совпадает с диаметральной плоскостью. Пусть в некоторый момент на этом судне произведена перекладка руля на заданный угол. В результате судно начинает совершать движение по криволинейной траектории.
Криволинейная траектория, которую описывает центр тяжести судна при перекладке руля на некоторый угол и последующем удержании его в этом положении, называется циркуляцией.
Различают три периода циркуляции: маневренный, эволюционный и период установившейся циркуляции.
Маневренный период циркуляции определяется началом и концом перекладки руля, т.е. по времени совпадает с продолжительностью перекладки руля. В этот период судно продолжает двигаться практически прямолинейно.
Эволюционный период циркуляции начинается с момента окончания перекладки руля и заканчивается, когда элементы движения примут установившийся характер, т.е. перестанут изменяться во времени.
Период установившейся циркуляции начинается с момента окончания эволюционного периода и длится все время, пока руль судна находится в переложенном положении.
Траектория криволинейного движения центра тяжести судна, т.е. его циркуляция характеризуется следующими элементами:
Диаметр установившейся циркуляции Дц - диаметр окружности, описываемой судном в установившийся период циркуляции, который начинается после поворота судна на 90-180°;
Тактический диаметp циркуляции Дт - кратчайшее расстояние между положением диаметральной плоскоскости судна в начале поворота и после изменения первоначального курса на 180°;
Выдвиг l1 расстояние, на которое смещается центр тяжести судна в направлении первоначального курса от точки начала циркуляции до точки, соответствующей изменению курса судна на 90°;
Прямое смещение l2 - расстояние от первоначального курса судна до точки положения центра тяжести в момент поворота судна на 90°;
Обратное cмещение l3 - наибольшее расстояние, на которое смещается центр тяжести судна от линии первоначального курса в сторону противоположную повороту.
Значение элементов циркуляции, выражаемых в долях диаметра циркуляции Дц, лежат в относительно узких пределах и для судов различных типов изменяются следующим образом:
Для морских транспортных судов Дт составляет 4-6 длин судна. Кроме указанных элементов к характеристикам циркуляции относят:
- период установившейся циркуляции Т - время поворота судна на 360°;
- угловую скорость вращения судна на установившейся циркуляции ω = 2π / Т.
Если на судне, идущем прямым курсом, внезапно переложить руль, то в первый момент после начала перекладки на судно действуют следующие силы: поперечная составляющая Ру сил, действующих на руль; поперечная составляющая Ry сил, действующих на погруженную часть корпуса судна; поперечная составляющая центробежных сил инерции судна Fц. Линия действия этой силы направлена в сторону поворота судна.
Все указанные силы располагаются в различных плоскостях по высоте. Таким образом, в первый момент после перекладки руля суммарный момент всех приведенных сил вызывает небольшой крен судна на тот борт, на который переложен руль. В результате такого накренения судна и действия поперечной составляющей Ру на руле возникает дрейф судна и обратное смещение l3 - смещение судна в сторону, противоположную повороту. Траектория циркуляции искажается. Обратное смещение не превышает половины ширины судна, но при маневрировании в стесненных условиях учитывать его нужно, так как оно выносит судно за внешнюю сторону циркуляции.
По мере изменения кривизны траектории центробежная сила уменьшается, а затем меняет знак, т.е. изменяет направление действия на противоположное. Одновременно происходит нарастание момента от силы Ry вследствие увеличения угла дрейфа и уменьшение момента от силы Рy из-за снижения скорости судна.
В результате изменения характера действия указанных сил, и моментов, судно сначала выпрямляется, а затем начинает крениться в сторону, обратную направлению перекладки руля. Причем угол крена оказывается тем больше, чем больше скорость судна на циркуляции, угол перекладки руля и чем меньше метацентрическая высота судна.
В результате такого крена и действия поперечной составляющей Pу на руле диаметральная плоскость судна на циркуляции не совпадает с касательной к криволинейной траектории движения центра тяжести, т.е. образуется угол дрейфа - b0. Нос судна смещается внутрь кривой циркуляции, а корма заносится во внешнюю сторону. С увеличением скорости судна угол дрейфа увеличивается. Из-за наличия угла дрейфа судно на циркуляции занимает полосу воды больше ширины судна. Это необходимо учитывать при маневрировании в узкости.
Во время поворота вследствие тормозящего действия руля и появления угла дрейфа возрастает сопротивление воды движению судна, что приводит к уменьшению скорости. Потеря скорости на циркуляции в некоторых случаях может достигать 50 %.
Под понятием "управление судном" понимается весь комплекс мероприятий, обеспечивающих безопасность мореплавания.Управление судном охватывает четыре относительно самостоятельных, но в то же время тесно взаимосвязанных и дополняющих друг друга направления: морская практика, маневрирования судном в различных условиях плавания, предупреждение столкновений судов, организация вахтенной службы и обеспечение безопасности мореплавания.
Дрейф судна


Значительная часть времени работы судов транспортного, промыслового, технического и служебно-вспомогательного флота происходит в условиях открытых и полузакрытых рейдов, в особенности в морях Тихого океана. Затяжка в производстве грузовых операций из-за периодических штормов.
Ледовые карты
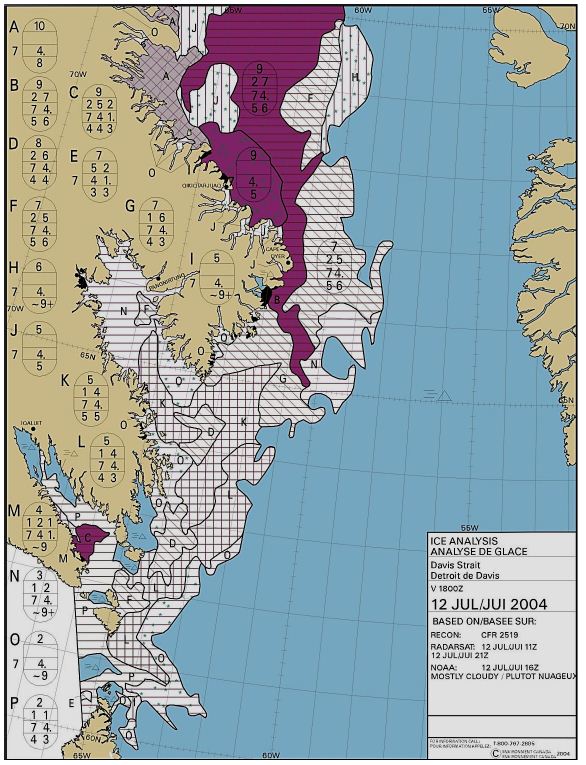

Решение о движении судна во льдах принимается на основе анализа ледовых карт, на которых в виде символов отображаются приведенные выше характеристики ледового покрова.
Информацию о состоянии льда получают с помощью искусственных спутников.
Признаки приближения ко льдам


Общее представление о распределении льда в районе плавания дает ледовая карта.
Однако судоводителю необходимо уметь уточнять время подхода ко льдам,особенно при плохой видимости или тумане.
Современные средства доставки и отображения гидрометеорологической информации на суда
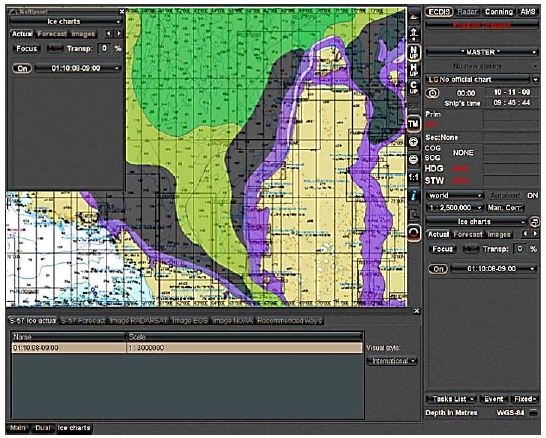

В 2006 году на базе Арктического и Антарктического института (ААНИИ) создана система контроля и прогнозирования состояния атмосферы и гидросферы для обеспечения морской деятельности в арктических и замерзающих морях РФ.
Зона обслуживания системы охватывает акваторию Северного Ледовитого океана.
Классификация судов и ледоколов


Плавание транспортных судов в ледовых условиях может происходить как самостоятельно, так и под проводкой ледоколов. По району ледового плавания морские транспортные суда по Правилам Российского Морского Регистра судоходства разделяются на две категории.
Подготовка судна к плаванию во льдах


Транспортные суда совершают плавание во льдах как самостоятельно, так и под проводкой ледоколов. Подготовка к плаванию во льдах включает: тщательный осмотр подводной части корпуса судна в доке и устранение дефектов; при этом особое внимание обращают на прочность и водонепроницаемость корпуса.
Самостоятельное плавание транспортного судна во льдах


Самостоятельное плавание транспортного судна во льдах разрешается только в том случае, если судно имеет ледовый класс Регистра, и при благоприятных ледовых прогнозах.
Получив ледовую карту, капитан судна обязан учитывать.
Маневрирование транспортного судна во льдах


Следуя во льдах, капитан судна придерживается рекомендованного ему генерального курса. Однако при этом он вынужден отклоняться от заранее намеченного пути и выбирать направления наименьшего сопротивления во льдах, т. е. маневрировать в сложных ледовых условиях.
Ледовый якорь


Масса ледовых якорей колеблется от 50 до 150 кг, а число их - от 2 до 4.
Ледовыми якорями снабжаются ледоколы, суда ледового плавания и транспортные суда при плавании в Арктике и Антарктике. Ледовый якорь является однолапым якорем, представляющим собой крюк.
Стоянка на якоре в ледовых условиях


Стоянка возможна лишь в тех случаях, когда место ее защищено берегами или барьером стоящих на мели льдин или не взломанным припаем льда. При кратковременной стоянке среди дрейфующих редких ледовых полей необходимо быть наготове для немедленной съемки с якоря.
Скорость ледового плавания


Одним из основных показателей, определяющих эффективность эксплуатации флота в замерзающих морях, является безопасная скорость движения судов во льдах. Безопасная допустимая скорость, определяемая прочностью корпуса судна, - это такая максимальная скорость, при которой судно.
Организация плавания во льдах


Плавание судов во льдах замерзающих морей имеет четкую организацию и регламентируется правилами для судов, проводимых ледоколами через лед.
Эти правила печатаются в лоциях морей.
Непосредственное руководство проводкой одного судна.
Формирование каравана для ледовой проводки


Требование о проводке судна через лед капитан судна направляет в порту начальнику порта, а в море — капитану ледокола.
При назначении в состав каравана капитан транспортного судна получает от руководства ледовыми операциями рекомендации для следования к месту.
Дистанция между судами каравана


Планируя расстановку судов в караване, капитан ведущего ледокола не всегда может учесть все особенности судов, поэтому окончательно сформировать караван и расставить суда можно уже в процессе проводки.
Капитан ледокола назначает дистанцию между судами.


Маневрирование – изменение направления движения судна и его скорости с помощью руля, движителей, подруливающих устройств в целях обеспечения безопасности мореплавания или решения эксплуатационных задач (швартовка, постановка на якорь, проход узкостей и т. п.).
Маневренность определяется такими качествами судна, как скорость, ходкость, управляемость, устойчивость на курсе и поворотливость, а также инерционными характеристиками судна.
Маневренность судна не является постоянной. Изменение ее происходит под влиянием различных факторов (загрузки, крена, дифферента, ветра и т. д.), которые надлежит учитывать судоводителям при управлении судном.
Под ходкостью понимается способность судна преодолевать сопротивление окружающей среды и перемещаться с требуемой скоростью при наименьшей затрате мощности главных машин.
Скорость судна - одна из важнейших характеристик маневренных элементов судна. Скоростью судна считается та скорость, с которой оно перемещается относительно воды.
Управляемость - способность судна двигаться по заданной траектории, т.е. удерживать заданное направление движения или изменять его под действием управляющих устройств. Главными управляющими устройствами на судне являются средства управления рулем, средства управления движителем, средства активного управления. Управляемость объединяет два свойства: устойчивость на курсе и поворотливость.
Устойчивость на курсе - это способность судна сохранять направление прямолинейного движения.
Поворотливость - способность судна изменять направление движения и описывать траекторию заданной кривизны.
Устойчивость на курсе и поворотливость находятся в противоречии друг с другом. Чем более устойчиво прямолинейное движение судна, тем труднее его повернуть, т. е. ухудшается поворотливость. Но с другой стороны, улучшение поворотливости судна затрудняет его движение в постоянном направлении, в этом случае удержание судна на курсе связано с напряженной работой рулевого или авто- рулевого и частой перекладкой руля. При проектировании судов стремятся найти оптимальное сочетание этих свойств.
Управляемость судна в основном определяется взаимным расположением трех точек: центра тяжести (ЦТ), центра приложения всех сил сопротивления движению и центра приложения движущих сил (рис. 1.19).
Если центр тяжести при определенном состоянии загрузки судна остается неподвижным, то центр приложения сил сопротивления не имеет постоянного местоположения. В зависимости от движения судна суммарный вектор сил сопротивления водной и воздушной сред изменяется, и точка его приложения к судну обычно перемещается вдоль диаметральной плоскости.
При поворотах судно разворачивается вокруг вертикальной оси (центра вращения - Р), проходящей через центр сил сопротивления.
Если ЦТ располагается впереди центра сил сопротивления, то судно устойчиво на курсе и наоборот, если ЦТ располагается позади центра сил сопротивления, то судно неустойчиво на курсе и более подвержено рысканию.
Расположение центра приложения движущих сил зависит от режима работы движителей, положения руля, воздействия ветра, течения и т. п. В зависимости от расположения указанных трех точек при движении судна могут произойти сопутствующие явления: крен, дифферент, поперечное смещение.
В результате воздействия обтекающих масс воды и ветра на корпус, винт и руль, даже при спокойном море и слабом ветре, судно не остается постоянно на заданном курсе, а отклоняется от него.
Отклонение судна от курса при прямом положении руля называется рыскливостью . Амплитуда рыскания судна в тихую погоду небольшая. Поэтому для удержания его на курсе требуется незначительная перекладка руля вправо или влево. При сильном ветре и волнении устойчивость судна на курсе значительно ухудшается.
На рыскливость судна большое влияние оказывает расположение надстройки. На тех судах, где надстройки на корме, рыскливость увеличивается, так как почти всегда корма идет «под ветер», а нос - «на ветер». Если надстройка в носу, то судно уклоняется «от ветра».
Уклонение судна под ветер называется увальчивостью . Это свойство так же, как рыскливость, является недостатком судна, его всегда приходится учитывать при осуществлении различных маневров, особенно в стесненных условиях.
Рис. 1.19. Расположение центра вращения судна
Силы и моменты, действующие на судно. Все силы, действующие на судно, разделяются на три группы: движущие, внешние, реактивные.
К движущим силам относятся силы, создаваемые средствами управления: тягой винта, боковой силой руля, силами, создаваемыми средствами активного управления.
К внешним силам относятся силы давления ветра, волнения моря, давления течения (рис. 1.20).
Рис. 1.20. Воздействие внешних сил на корпус судна

К реактивным силам относятся силы, возникающие в результате движения судна под действием движущих и внешних сил. Они разделяются на инерционные − обусловленные инертностью судна и присоединенных масс воды и возникающие только при наличии ускорений. Направление действия инерционных сил всегда противоположно действующему ускорению.
Неинерционные силы обусловлены вязкостью воды и воздуха и являются гидродинамическими и аэродинамическими силами.


Управляемостью называется способность судна быть поворотливым и устойчивым на курсе.
Поворотливостью называется способность судна подчиняться действию руля, а устойчивостью на курсе - способность сохранять заданное направление движения.
Вследствие влияния на движение судна различных возмущающих факторов (волн, ветра), для обеспечения устойчивости на курсе требуется постоянное вмешательство рулевого.
Таким образом, качества, характеризующие управляемость судна, являются противоречивыми.
Так, чем более поворотливо судно, т. е. чем быстрее оно меняет направление своего движения при повороте руля, тем менее оно устойчиво на курсе.
При проектировании судна оптимальное значение того или иного качества выбирают в зависимости от назначения судна. Основным качеством пассажирских и грузовых судов, совершающих дальние рейсы, является устойчивость на курсе, а буксиров - поворотливость.
Способность судна самопроизвольно отклоняться от курса под влиянием внешних сил называется рыскливостью.
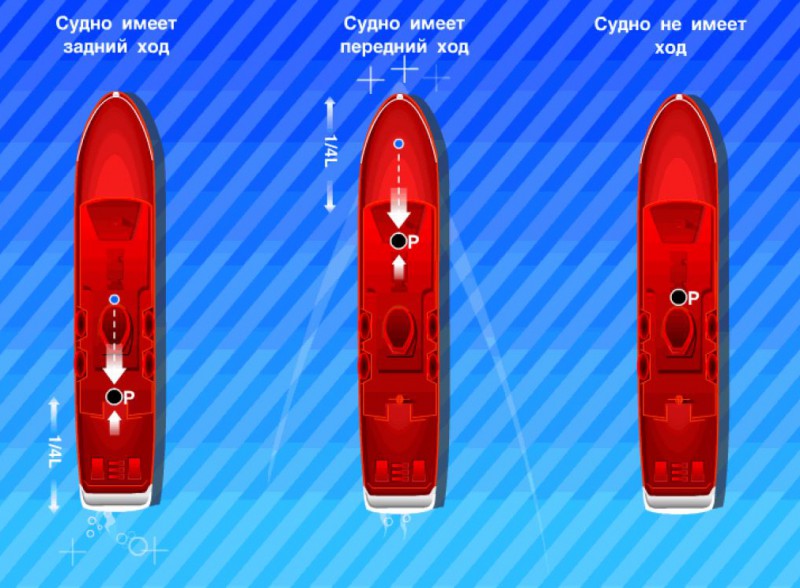
Для обеспечения требуемой управляемости в кормовой части судна устанавливают один или несколько рулей. Если на движущемся со скоростью v судне переложить руль на угол α, то на одну сторону руля начнет действовать давление набегающего потока воды — равнодействующая гидродинамических сил Р, приложенная в центре давления и направленная перпендикулярно к поверхности руля. Приложим в центре тяжести судна взаимно уравновешенные силы P1 и Р2, равные и параллельные Р. Силы Р и Р2 образуют пару сил, момент которой МВР поворачивает судно вправо, МВР = Рl, где плечо пары l= GA cosα + a.
Схема сил, действующих на судно при перекладке пера руля

Приближенно можно считать, что центр тяжести судна лежит на мидель-шпангоуте, а величина а сравнительно мала. Тогда GA = 0,5L; l=0,5Lcosα и MВР=0,5PLcosα.
Силу Р1 разложим на составляющие Q = P1 cosα = P cosα и R = P1 sinα = Psinα. Сила Q вызывает дрейф, т. е. перемещение судна перпендикулярно к направлению движения, а сила R уменьшает его скорость.
Элементы циркуляции судна: DЦ – диаметр циркуляции; DТ – тактический диаметр циркуляции; β – угол дрейфа

Таким образом, сразу же после перекладки руля на борт ЦТ судна начнет описывать в горизонтальной плоскости кривую, постепенно переходящую в окружность, называемую циркуляцией. Диаметр окружности DЦ, которую начнет описывать центр тяжести судна после начала установившейся циркуляции называется диаметром циркуляции.
Расстояние между ДП до начала циркуляции и после поворота судна на 180° - тактическим диаметром циркуляции DT. Мерой поворотливости судна является отношение диаметра циркуляции к длине судна. Угол между ДП судна и касательной к траектории движения судна при циркуляции, проведенной через центр тяжести судна, называется углом дрейфа β.
При движении на циркуляции судно кренится на борт, противоположный перекладке руля, под действием центробежной силы инерции, приложенной в центре тяжести судна, и гидродинамических сил, приложенных к подводной части судна и рулю. Для обеспечения хорошей управляемости на малых ходах (в стесненной акватории, при швартовке), когда обычный руль неэффективен, применяют средства активного управления.
Автор статьи

Читайте также: