
Как ориентируются суда в море
Обновлено: 25.04.2024

На ходовом мостике находятся приборы и устройства, необходимые для управления судном. Навигационные приборы – предназначены для определения местоположения судна и измерения отдельных элементов его движения:
- компасы
- гироазимуты
- автопрокладчики
- лаги
- лоты
- эхолоты
- секстаны и другие устройства
Компасы
Компас – основной навигационный прибор, служащий для определения курса судна, направлений (пеленгов) на различные объекты. На судах применяются магнитные и гироскопические компасы.
Магнитные компасы используются в качестве резервных и контрольных приборов. По назначению магнитные компасы делятся на главные и путевые. Главный компас устанавливают на верхнем мостике в диаметральной плоскости судна, так, чтобы обеспечить хороший обзор по всему горизонту (рис. 3.1). Изображение шкалы картушки при помощи оптической системы проектируется на зеркальный отражатель, установленный перед рулевым (рис. 3.2).
Путевой магнитный компас устанавливают в рулевой рубке. Если главный компас имеет телескопическую передачу отсчета к посту рулевого, то путевой компас не устанавливают.
На магнитную стрелку на судне действует судовое магнитное поле. Оно представляет собой совокупность двух магнитных полей: поля Земли и поля судового железа. Этим объясняется, что ось магнитной стрелки располагается не по магнитному меридиану, а в плоскости компасного меридиана. Угол между плоскостями магнитного и компасного меридианов называется девиацией.
В комплект компаса входят: котелок с картушкой, нактоуз, девиационный прибор, оптическая система и пеленгатор.
На спасательных шлюпках используется легкий, небольшой по размерам компас, не закрепленный стационарно (рис. 3.3).
Гирокомпас – механический указатель направления истинного (географического) меридиана, предназначенный для определения курса объекта, а также азимута (пеленга) ориентируемого направления (рис.3.4–3.5). Принцип действия гирокомпаса основан на использовании свойств гироскопа и суточного вращения Земли.
Гирокомпасы имеют два преимущества перед магнитными компасами:
- они показывают направление на истинный полюс, т. е. на ту точку, через которую проходит ось вращения Земли, в то время как магнитный компас указывает направление на магнитный полюс;
- они гораздо менее чувствительны к внешним магнитным полям, например, тем полям, которые создаются ферромагнитными деталями корпуса судна.
Простейший гирокомпас состоит из гироскопа, подвешенного внутри полого шара, который плавает в жидкости; вес шара с гироскопом таков, что его центр тяжести располагается на оси шара в его нижней части, когда ось вращения гироскопа горизонтальна.
Гирокомпас может выдавать ошибки измерения. Например, резкое изменение курса или скорости вызывают девиацию, и она будет существовать до тех пор, пока гироскоп не отработает такое изменение.
На большинстве современных судов имеются системы спутниковой навигации (типа GPS) и/или другие навигационные средства, которые передают во встроенный компьютер гирокомпаса поправки. Современные конструкции лазерных гироскопов не выдают таких ошибок, поскольку вместо механических элементов в них используется принцип разности оптического пути.
Электронный компас построен на принципе определения координат через спутниковые системы навигации. Принцип действия компаса:
1. На основании сигналов со спутников определяются координаты приемника системы спутниковой навигации.
2. Засекается момент времени, в который было сделано определение координат.
3. Выжидается некоторый интервал времени.
4. Повторно определяется местоположение объекта.
5. На основании координат двух точек и размера временного интервала вычисляется вектор скорости движения:
- направление движения;
- скорость движения.
SC-130 спутниковый компас - Основные особенности:
- Не требует технического обслуживания
- Точность определения курса 0,25°. Идеально подходит для установки на средних по размеру и крупных судах для навигации в переполненных судами портах
- Использование ГНСС Галилео и ГЛОНАСС для получения максимальной точности. За счет приема сигналов от спутников различного типа исключается проблема отсутствия сигнала из-за недостаточного количества спутников
- Сверхмалое время инициализации – 90 секунд
- Удобное подключение к существующей судовой сети через Ethernet
- Высокая скорость слежения 40°/с (в два раза больше, чем требуется ИМО для высокоскоростных судов)
- Высокоточные данные о бортовой/килевой качке в аналоговом и цифровом форматах для стабилизаторов качки, гидролокаторов, и др.
- Контроль скорости перемещения носа и кормы судна для безопасной швартовки
Эхолот
Навигационный эхолот предназначен для надежного измерения, наглядного представления, регистрации и передачи в другие системы данных о глубине под килем судна (рис. 3.7). Эхолот должен функционировать на всех скоростях судна от 0 до 30 узлов, в условиях сильной аэрации воды, ледяной и снежной шуги, колотого и битого льда, в районах с резко меняющимся рельефом дна, скалистым, песчаным или илистым грунтом.
На судах устанавливаются гидроакустические эхолоты. Принцип их работы заключается в следующем: механические колебания, возбуждаемые в вибраторе-излучателе, распространяются в виде короткого ультразвукового импульса, доходят до дна и, отразившись от него, принимаются вибратором-приемником.
Эхолоты автоматически указывают глубину моря, которую определяют по скорости распространения звука в воде и промежутку времени от момента посылки импульса до момента его приема (рис. 3.8).
Эхолот должен обеспечивать измерение глубин под килем в диапазоне от 1 до 200 метров. Указатель глубин должен быть установлен в рулевой рубке, а самописец – в рулевой или штурманской рубке.
Для измерения глубин применяется также ручной лот в случаях посадки судна на мель, промера глубин у борта во время стоянки у причала и т. п.
Ручной лот (рис. 3.9) состоит из свинцовой или чугунной гири и лотлиня. Гиря выполняется в форме конуса высотой 25–30 см и весом от 3 до 5 кг. В нижнем широком основании гири делается выемка, которая перед замером глубины смазывается солидолом. При касании лотом морского дна частицы грунта прилипают к солидолу, и после подъема лота по ним можно судить о характере грунта.
Разбивка лотлиня производится в метрических единицах и обозначается по следующей системе: на десятках метров вплетаются флагдуки различных цветов; каждое количество метров, оканчивающееся цифрой 5, обозначается кожаной маркой с топориками.
В каждой пятерке первый метр обозначается кожаной маркой с одним зубцом, второй – маркой с двумя зубцами, третий – с тремя зубцами и четвертый – с четырьмя.
Примерно с конца XV в. получил известность простой измеритель скорости – ручной лаг. Он состоял из деревянной дощечки со свинцовым грузом формой в 1/1 круга, к которой прикреплялся легкий трос, имеющий узлы через равные промежутки (чаще всего 7 м). Для измерения скорости парусных судов, плававших в те времена, лаг, как приблизительно постоянная отметка на поверхности воды, бросали за борт и поворачивали песочные часы, отмеряющие определенную продолжительность времени (14 с). За время, пока сыпался песок, матрос считал количество узлов, которые проходили через его руки. Число узлов, полученных за это время, давало в пересчете скорость судна в морских милях в час. Этот способ измерения скорости объясняет возникновение выражения «узел».
Лаг – навигационный прибор для измерения скорости судна и пройденного им расстояния. На морских судах применяются механические, геомагнитные, гидроакустические, индукционные и радиодоплеровские лаги.
- относительные лаги, измеряющие скорость относительно воды;
- абсолютные лаги, измеряющие скорость относительно дна.
Гидродинамический лаг – относительный лаг, действие которого основано на измерении разности давления, которая зависит от скорости судна. Основу гидродинамического лага составляют две трубки, выведенные под днище судна: выходное отверстие одной трубки направлено к носовой части судна; а выходное отверстие другой трубки находится заподлицо с обшивкой. Динамическое давление определяется по разности высот воды в трубках и преобразуется механизмами лага в показания скорости судна в узлах. Кроме скорости, гидродинамические лаги показывают пройденное судном расстояние в милях.
Индукционный лаг – относительный лаг, принцип действия которого основан на зависимости между относительной скоростью проводника в магнитном поле и наводимой в этом проводнике электродвижущей силой (ЭДС). Магнитное поле создается электромагнитом лага, а проводником является морская вода. Когда судно движется, магнитное поле пересекает неподвижные участки водной среды, при этом в воде индуцируется ЭДС, пропорциональная скорости перемещения судна. С электродов ЭДС поступает в специальное устройство, которое вычисляет скорость судна и пройденное расстояние.
Гидроакустический лаг – абсолютный лаг, работающий на принципе эхолота. Различают доплеровские и корреляционные гидроакустические лаги.
Геомагнитный лаг – абсолютный лаг, основанный на использовании свойств магнитного поля Земли.
Радиолаг – лаг, принцип действия которого основан на использовании законов распространения радиоволн.
На практике отсчеты лага замечают в начале каждого часа и по разности отсчетов получают плавание S в милях и скорость судна V в узлах. Лаги имеют погрешность, которая учитывается поправкой лага.
Радионавигационные приборы
Судовая радиолокационная станция (РЛС) предназначена для обнаружения надводных объектов и берега, определения места судна, обеспечения плавания в узкостях, предупреждения столкновения судов (рис. 3.10).
В РЛС используется явление отражения радиоволн от различных объектов, расположенных на пути их распространения, таким образом, в радиолокации используется явление эха. РЛС содержит передатчик, приемник, антенно-волноводное устройство, индикатор с экраном для визуального наблюдения эхо-сигналов.
Принцип работы РЛС следующий. Передатчик станции вырабатывает мощные высокочастотные импульсы электромагнитной энергии, которые с помощью антенны посылаются в пространство узким лучом. Отраженные от какого-либо объекта (судна, высокого берега и т. п.) радиоимпульсы возвращаются в виде эхо-сигналов к антенне и поступают в приемник. По направлению узкого радиолокационного луча, который в данный момент отразился от объекта, можно определить пеленг или курсовой угол объекта. Измерив промежуток времени между посылкой импульса и приемом отраженного сигнала, можно получить расстояние до объекта. Так как при работе РЛС антенна вращается, излучаемые импульсные колебания охватывают весь горизонт. Поэтому на экране индикатора судовой РЛС создается изображение окружающей судно обстановки. Центральная светящаяся точка на экране индикатора РЛС отмечает место судна, а идущая от этой точки светящаяся линия показывает курс судна.
Изображение различных объектов на экране радара может быть ориентировано относительно диаметральной плоскости судна (стабилизация по курсу) или относительно истинного меридиана (стабилизация по норду). Дальность «видимости» РЛС достигает несколько десятков миль и зависит от отражательной способности объектов и гидрометеорологических факторов.
Судовые РЛС позволяют за короткий промежуток времени определить курс и скорость встречного судна и избежать, таким образом, столкновения.
Средства автоматической радиолокационной прокладки (САРП) – это радиолокационные информационно-вычислительные комплексы, выполняющие автоматическую обработку радиолокационной информации. САРП выполняет следующие операции (рис. 3.11):
- ручной и автоматический захват целей и их сопровождение;
- отображение на экране индикатора векторов относительного или истинного перемещения целей;
- выделение опасно сближающихся целей;
- индикацию на табло параметров движения и элементов сближения целей;
- проигрывание маневра курсом и скоростью для безопасного расхождения;
- автоматизированное решение навигационных задач;
- отображение элементов содержания навигационных карт;
- определение координат местоположения судна на основе радио-локационных измерений.
Автоматическая информационная система (АИС) является морской навигационной системой, использующей взаимный обмен между судами, а также между судном и береговой службой для передачи информации о позывном и наименовании судна для его опознавания, координатах, сведений о судне (размеры, груз, осадка и др.) и его рейсе, параметрах движения (курс, скорость и др.) с целью решения задач по предупреждению столкновений судов, контроля за соблюдением режима плавания и мониторинга судов в море.
Электронные картографические навигационные информационные системы (ЭКНИС) являются эффективным средством навигации, существенно сокращающим нагрузку на вахтенного помощника и позволяющим уделять максимум времени наблюдению за окружающей обстановкой и выработке обоснованных решений по управлению судном (рис. 3.12).
Основные возможности и свойства ЭКНИС:
- проведение предварительной прокладки;
- проверка маршрута на безопасность;
- ведение исполнительной прокладки;
- автоматическое управление судном;
- отображение «опасной изобаты» и «опасной глубины»;
- запись информации в электронный журнал с возможностью дальнейшего проигрывания;
- ручная и автоматическая (через Internet) корректура;
- подача сигнала тревоги при приближении к заданной изобате или глубине;
- дневная, ночная, утренняя и сумеречная палитры;
- электронная линейка и неподвижные метки;
- базовая, стандартная и полная нагрузка дисплея;
- обширная и дополняемая база морских объектов;
- база приливов более чем в 3000 точек Мирового океана.
Спутниковая система навигации – это система, состоящая из наземного и космического оборудования, предназначенная для определения местоположения (географических координат), а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов (рис. 3.13).
GPS – это глобальная навигационная спутниковая система определения местоположения Global Position System. Система включает группировку низкоорбитальных навигационных спутников, наземные средства слежения и управления и самые разнообразные, служащие для определения координат. Принцип определения своего места на земной поверхности в глобальной системе позиционирования заключается в одновременном измерении расстояния до нескольких навигационных спутников (не менее трех) – с известными параметрами их орбит на каждый момент времени, и вычислении по измененным расстояниям своих координат.
Навигационные инструменты
Навигационный секстан – угломерный инструмент (рис. 3.14), служащий:
- в мореходной астрономии – для измерения высот светил над видимым горизонтом;
- в навигации – для измерения углов между земными предметами.
Слово «секстан» происходит от латинского слова Sextans – шестая часть круга.
Морской хронометр – высокоточные переносные часы, позволяющие получать в любой момент достаточно точное гринвичское время (рис. 3.15).
Судовое время определяется по меридиану местонахождения судна и чаще всего корректируется ночью вахтенным офицером. Так, например, при изменении долготы на 15° на восток часы переводятся на 1 час вперед, а при изменении долготы на 15° в западном направлении – на 1 час назад.
Для того чтобы в машинном отделении, столовой команды, каютах, салонах, барах, камбузе иметь точное и одинаковое показание времени, устанавливают электрические часы, корректируемые от главных часов, находящихся на мостике.
К прокладочным инструментам относятся (рис. 3.16):
- измерительный циркуль – для измерения и откладывания расстояний на карте;
- параллельная линейка – для проведения на карте прямых, а также параллельных заданному направлению линий;
- навигационный транспортир – для построения и измерения углов, курсов и пеленгов на карте.
Кроме этого, на мостике находятся журналы, папки с документацией, навигационные карты, обязательные справочники и пособия и др. (рис. 3.17).
Дисциплина «Навигация и лоция» решает задачу выбора безопасного и выгодного пути судна и обеспечения плавания по выбранному маршруту с учетом преобладающих гидрометеоусловий.
Навигация и лоция изучает:
- методы определения направлений в море;
- теорию картографических проекций;
- навигационные карты, пособия и руководства для плавания, их корректуру;
- методы определения места судна по наземным ориентирам;
- навигационные опасности и способы их ограждения;
- навигационные инструменты и приборы;
- основные принципы несения ходовой навигационной вахты.
Положение судна на поверхности Земли определяется с помощью географических координат. Формой Земли является геоид – неправильное геометрическое тело, но для простоты принимаем форму Земли за шар (рис. 3.18).
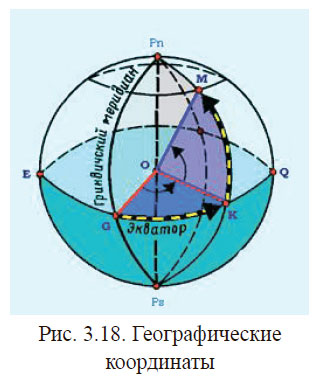
Воображаемая прямая, вокруг которой происходит вращение Земли, называется земной осью. Точки пересечения ее с поверхностью Земли называются географическими или истинными полюсами –Северным PN и Южным PS.
Окружность большого круга EQ, плоскость которого перпендикулярна земной оси и проходящая через центр Земли, называется экватором. Он делит земной шар на Северное и Южное полушария.
Окружности малых кругов, плоскости которых параллельны плоскости экватора, называются параллелями. Окружности больших кругов, плоскости которых проходят через ось Земли, называются меридианами.
Меридиан, проходящий через астрономическую обсерваторию в Гринвиче (Англия), называется Гринвичским или нулевым меридианом. Гринвичский меридиан вместе с противоположным ему меридианом делит земной шар на Восточное и Западное полушария.
Меридианы и параллели на земной поверхности образуют сетку географических координат. Главные направления – четыре взаимно перпендикулярных направления в плоскости истинного горизонта: N (норд), S (зюйд), E (ост), W (вест). Относительно этих направлений и осуществляется ориентирование на поверхности Земли.
Начало координат – в точке пересечения экватора с Гринвичским меридианом. Координатными линиями являются параллели и меридианы, а координатами – географическая широта и географическая долгота.
Географической широтой какой-либо точки (например, точки М – местоположение нашего судна) называется угол при центре Земли (угол МОК), составленный земным радиусом, проведенным через данную точку (линия МО), и плоскостью экватора EQ. Широта измеряется дугой меридиана от экватора до параллели данной точки (дуга КМ). Она отсчитывается к северу или югу от экватора и лежит в пределах от 0° до 90°. Если точка находится в Северном полушарии, ее широте дается наименование N (северная), если в южном – S (южная).
Географической долготой какой-либо точки называется угол между плоскостью Гринвичского меридиана и плоскостью меридиана данной точки (угол GOK). Долгота отсчитывается от Гринвичского меридиана к востоку или западу и лежит в пределах от 0° до 180°. Если точка находится в Восточном полушарии, то долготе приписывается наименование Е (восточная), если в западном – W (западная).
За единицу длины в море принята морская миля. Морской милей называется значение 1 минуты дуги земного меридиана. Принято среднее значение величины морской мили, равное 1852 метра. Кабельтов – единица длины, равная 1/10 мили, или 185,2 метра.
В открытом море наблюдатель видит вокруг судна водную поверхность, ограниченную кругом, называемым видимым горизонтом. Расстояние De от места наблюдателя до линии видимого горизонта называется дальностью видимого горизонта и определяется формулой:

где е – высота глаза наблюдателя над уровнем моря, измеряемая в метрах.
Эта формула позволяет определить дальность до предметов, находящихся на уровне моря. Если предмет имеет собственную высоту над уровнем моря, то наблюдатель обнаружит значительно раньше. При дожде, снегопаде, тумане, мгле дальность видимости сокращается. Наоборот, при определенном состоянии атмосферы рефракция может быть большой, вследствие чего дальность видимости предметов оказывается значительно больше рассчитанной.
Явление преломления световых лучей в атмосфере называется земной рефракцией, которая зависит от атмосферного давления, температуры и влажности воздуха.
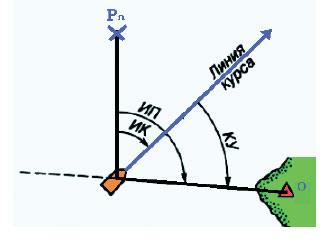
Истинным курсом ИК называется горизонтальный угол между направлением на Северный полюс (Pn) и диаметральной плоскостью (ДП) судна по направлению его движения, измеренный по ходу часовой стрелки.
Истинный пеленг ИП – горизонтальный угол между направлением на Северный полюс (Pn) и направлением на ориентир (О), измеряемый по часовой стрелке.
Курсовым углом КУ называется угол между носовой частью диаметральной плоскости судна и линией пеленга. В основном курсовые углы измеряют в полукруговой системе (от 0° до 180°) и им придают наименования, указывающие, в сторону какого борта судна (правого или левого) вели счет. Например: КУ= 10° л/б, КУ= 45° п/б.
М ежду ИК, ИП и КУ существует следующая зависимость:
- ИП = ИК + КУ;
- ИК = ИП – КУ;
- КУ = ИП – ИК.
Земля представляет собой гигантский магнит. Магнитные полюсы Земли сравнительно недалеко располагаются от географических, но с ними не совпадают. Кроме этого, они постоянно постепенно изменяют свое положение. В результате стрелка магнитного компаса оказывается отклоненной на некоторый угол от плоскости истинного меридиана. Этот угол называется магнитным склонением d и отсчитывается от северной части истинного меридиана (Pn) к Е или к W. Если стрелка отклонена к Е, то склонение имеет наименование восточное и ему присваивается знак плюс (+), если к западу – западное со знаком минус (–).
На навигационные карты наносят значение и наименование склонения в районе плавания (рис. 3.19). Надписи о значении склонения помещают в центре картушки, нанесенной на карте. Установлено, что значение склонения ежегодно изменяется, поэтому на картах указывают год, к которому относится склонение, и значение его годового изменения. Годовое изменение необходимо учитывать при расчете поправки компаса. Для этого к значению склонения прибавляют или вычитают из него годовое изменение склонения, умноженное на разность лет между годом на данный момент и годом, к которому относится склонение на карте.
На направление стрелки магнитного компаса оказывает также влияние судовое железо. Горизонтальный угол, на который отклоняется стрелка компаса под действием магнитного поля судна, называется девиацией магнитного компаса δ.
На каждом курсе девиация у судовых компаса различна, поэтому ее периодически определяют и заносят в специальную таблицу (рис. 3.20).
Таким образом, поправка магнитного компаса равна:
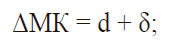
Между ИК, МК и МП существуют следующие зависимости, при этом необходимо учитывать знак магнитной поправки ΔМК:
Главная ось гирокомпаса под действием направляющей силы должна устанавливаться в плоскости истинного меридиана, но в результате различных причин полное совпадение не происходит. Вследствие этого гирокомпас и картушки репитеров имеют свою поправку ΔГК. Поправка отсчитывается от Pn к востоку Е (+) или к W (–).
Курсы и пеленги, определяемые относительно гирокомпасного меридиана, называются гирокомпасными. Существует следующая зависимость:
Неверные показания компасов или неправильный учет их поправок – основные причины навигационных ошибок. При приемке вахты необходимо сличать показания гиро- и магнитного компасов, а также в начале каждого часа и при изменении курса судна. В течение рейса поправки компасов систематически уточняют.
Дальние морские путешествия люди совершали еще в древности. Например около 600 года до н. э. финикийские мореходы обошли вокруг Африки. А в 325 году до н.э. древнегреческий путешественник Пифей, плывя вдоль берегов Европы, добрался до Полярного круга. Однако эти странствия, как и другие, им подобные, не требовали от моряков сложных навигационных знаний. Достаточно было просто плыть вдоль побережья. Если же буря относила корабль в открытое море, направление к берегу узнавалось по Солнцу или звездам.

Всё усложнилось, когда путешественники начали плавать через океаны. Здесь морякам понадобилось как-то определять свое местоположение в пространстве. Это можно было сделать двумя способами. Например всё время следить за направлением и скоростью корабля и на основании этих наблюдений рассчитать, куда он переместился. А можно каждый раз заново определять географическую широту и долготу места, до которого доплыло судно.
С ДОСКОЙ ЗА КОРМОЙ
Первый метод очень неточен. Дело в том, что если направление движения судна (то есть его курс) определялось сравнительно несложно – по Солнцу, звездам или компасу, то измерение скорости было большой проблемой. Обычно для этого использовали лаг – небольшую доску с привязанной к ней веревкой и грузом. На веревке на одинаковом расстоянии друг от друга были завязаны узлы. Лаг выбрасывался за борт и подсчитывалось количество узлов, ушедших за борт за определенное время (например за минуту).
Отсюда, кстати, происходит единица измерения скорости, до сих пор применяемая на флоте, – узел. Понятно, что точность такого измерения оставляла желать лучшего – хотя бы потому, что минуту обычно засекали… читая определенную молитву. Даже если путешествие через океан проходило в идеальных условиях, конечная точка пути нередко определялась с ошибкой 100-150 км.
А уж куда унесло корабль во время бури, когда ни за курсом, ни за скоростью судна уследить было невозможно, оставалось только догадываться. Тем не менее, в течение многих столетий моряки вынуждены были пользоваться именно этим способом навигации. Почему? Сейчас объясним, но сперва расскажем о втором методе.
Определять географическую широту путешественники научились очень давно – для этого были придуманы такие приборы, как квадрант и астролябия. С их помощью с большой точностью можно измерить высоты небесных светил над горизонтом. Легче всего определять широту с помощью Полярной звезды – ее высота над горизонтом равна широте места наблюдения. (В южном полушарии вместо Полярной звезды использовали центр созвездия Южный Крест.) А вот отсутствие надежного метода определения долготы несколько веков было настоящей головной болью для мореходов.
Хотя, казалось бы, проблема решалась просто. Нужно было всего лишь взять с собой в плавание точные часы, показывающие время на нулевом меридиане. Днем, около полудня, выйти на палубу и заметить, когда тень от мачты станет самой короткой. Это время – астрономический полдень. В этот момент нужно посмотреть на часы.
Сколько они показывают? Допустим, час дня. Значит, Солнцу понадобился этот час, чтобы добраться от нулевого меридиана до той точки, где сейчас находится корабль. Но если Солнце обходит всю Землю (360 градусов) за 24 часа, значит, за один час оно пройдет 15 градусов. Вот и всё, долгота измерена! И даже никаких приборов с непонятными названиями, как для измерения широты, не понадобилось – только обычные часы.
Но это сейчас мы можем пойти в соседний магазин и приобрести там часы с точным ходом. А в XVI, XVII и даже в начале XVIII века единственным способом измерять время на корабле были склянки – песочные часы, которые надо было переворачивать каждые полчаса. Разумеется, это – не лучший прибор для определения времени. Но на стрелочные часы надеяться и вовсе не приходилось: достаточно сказать, что на большинстве часов тех лет была только одна стрелка – часовая. Конечно, плавать через Атлантический океан из Европы в Америку можно, и не умея определять долготу: плыви себе на запад, и рано или поздно упрешься в материк. А вот найти небольшой острое посреди океана, не зная его долготу, было гораздо сложнее. Поэтому многие острова в Тихом океане открывали, а затем опять теряли на долгое время. Например Соломоновы острова были открыты в 1568 году испанским мореплавателем Альваро Менданья де Нейра. Через 27 лет Альваро отправился их колонизировать. Однако, из-за того, что долгота этих островов была неизвестна, найти их вторично не удалось (хотя в ходе поисков экспедиция открыла несколько других островов). И лишь через 200 лет после открытия, в 1767 году, на Соломоновы острова случайно наткнулся англичанин Филипп Картерт.
Словом, понятно, что не имея возможность точно определить свою долготу, корабли нередко проплывали мимо цели, садились на мель и разбивались о скалы даже у европейских берегов, казалось бы, давно и хорошо известных. Особенно от этого страдала Великобритания, обладавшая большим флотом. Поэтому в 1714 году британский парламент предложил премию 10 000 фунтов стерлингов (огромные деньги по тем временам!) тому, кто придумает метод, позволяющий определять долготу с погрешностью не более одного градуса. Причем для получения преми, определение долготы должно было производиться в Вест-Индии, путь до которой занимал тогда почти два месяца. А так как Солнце проходит один градус за четыре минуты, то задача сводилась к следующему: нужно было сделать часы, которые спешили или отставали бы не более чем на четыре минуты за два месяца. В 1728 году за эту работу взялся часовщик-самоучка Джон Харрисон. Первые несколько его моделей оказались неудачными. Наконец, после 32 лет работы, Харрисону удалось создать корабельный хронометр с требуемыми характеристиками и получить заслуженную премию и прозвище Долгота в придачу. Вскоре хронометрами модели Харрисона обзавелись капитаны всех судов – сначала в Великобритании, а затем и в других странах.
Ну а в XX веке определение координат вышло на совсем другой уровень: сперва появилось радио, передающее сигналы точного времени, затем – электронные часы и, наконец, спутниковые системы навигации. Сегодня, используя GPS-навигацию вкупе со специальным методом, можно определить координаты с точностью до… 1 см! И, тем не менее, на кораблях многих стран мира вахтенные матросы по традиции отбивают склянки – звонят в колокол каждые полчаса, а все штурманы морского флота умеют пользоваться старинными приборами: мало ли что может случиться с электроникой…
Навигационный метод определения места судна по крюйс пеленгу применяется в яхтинге в тех случаях, когда пеленг на предмет определить можно, а вот расстояние до него — нет. Предмет пеленгуют дважды, место судна получают на момент вторых измерений. Место это будет счислимо-обсервованным, а не обсервованным. Заметим здесь, что счислимо-обсервованное место получается всегда с использованием элементов счисления (времени и отсчетов лага). Следовательно, его точность в яхтиге впрямую зависит от точности счисления,тогда как чисто обсервованное место от счисления не зависит, и на него можно полагаться вернее.
![определение места судна по крюйс-пеленгу]()
Метод определения места судна по крюйс пеленгу.
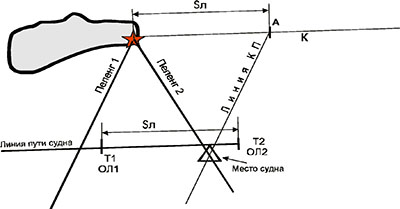
При пеленговании в навигационном методе определения места судна по крюйс пеленгу замечают моменты времени Т1 и Т2 и отсчёты лага ОЛ1 и ОЛ2. Прокладка и вычисления в яхтинге выполняются в следующей последовательности.
1) Прокладывают первый пеленг П1. На линии пути отмечают счислимую точку, записывают время Т1 и отсчёт лага OЛ1.
2) Прокладывают второй пеленг П2, отмечают время Т2 и отсчёт лага OЛ2.
3) При определении места судна по крюйс пеленгу из точки ориентира проводим линию, параллельную линии пути судна в направлении движения яхты (линия К).
4) Снимаем с карты расстояние Sл между счислимыми точками на моменты первых и вторых наблюдений и откладываем его на линии К. Это же расстояние можно вычислить по формуле, если известна поправка лага (а мы полагаем, что она известна, или равна нулю, иначе как бы счисление вообще вели?): Sл= РОЛ * (1+ΔЛ/100). Получаем точку А.
5) Из точки А проводим линию, параллельную первому пеленгу (линия КП).
6) В пересечении линии КП и второго пеленга получаем место судна. Построения навигационного метода определения места судна по крюйс пеленгу хорошо видны на рисунке.
Навигационные методы определения места судна в море по расстояниям (дистанциям).
Существуют в яхтинге следующие навигационные методы определения места судна по расстояниям: по двум дистанциям, по трём дистанциям, по крюйс-расстоянию.
Здесь нужно отметить, что расстояния в навигации могут быть измерены двумя способами — визуально (с помощью дальномера и по измеренному секстаном вертикальному углу до ориентира, высота которого известна) и с помощью радиолокатора. Говоря честно, дальномер на яхтах не встретишь. Что касается измерения расстояния с помощью секстана, то способом этим в яхтинге сейчас никто не пользуется, потому что сделать это, используя радар, и проще, и надёжнее, и быстрее. Но радар — это всего лишь техника, которая, хоть и достаточно редко, но ломается. А значит, мы должны иметь всегда в резерве старые, дедовские методы. Потому метод определения места судна по расстояниям с помощью секстанта мы здесь разберём, мало ли что, а вдруг, да пригодится.

Нам может быть известна высота предмета, как над уровнем моря, так и от его основания. Вот что известно, то и меряем. То есть либо угол между срезом воды и вершиной, либо между основанием и вершиной ориентира. Рисуем сию хитрость .
Имеем: наше местоположение (точка О), при этом высотой глаза наблюдателя смело пренебрегаем, измеренный секстаном вертикальный угол между срезом воды и высотой ориентира α, высоту ориентира над уровнем моря h. Необходимо найти дистанцию до ориентира D. Используем для решения задачи в навигационном методе определения места судна по расстояниям формулы обыкновенной тригонометрии.
Из рисунка, который, собственно говоря, представляет собой прямоугольный треугольник с вершинами в точках: места яхты — О, вершины ориентира — В, и основания ориентира (не обозначаем, потому что ни к чему), видно: D = h ctg α. Измеряемые для решения этой задачи углы очень малы, и на практике в яхтинге при определении места судна по расстояниям их котангенсы не вычисляют. Просто берут полученный угол и выражают его в радианах. Тогда наша формула примет вид: D = h α(рад.).
Так как у нас известная высота ориентира дана в метрах, то и результат мы получим в метрах. Переведём его в морские мили, разделив на 1852. А наши градусы-минуты (на самом деле — только минуты, тут до градусов дело никогда не доходит), сразу переведём в радианную меру, пользуясь соотношением: tg α = α’ arc 1’ = α’ : 3438 , получим: D =3438h/1852α’=1.86 h/α’
Пример: Известны:
Высота ориентира h = 135 м.
Отсчёт секстана ОС = 0° 12,3′
Инструментальная поправка секстана i + s = +1,2′
Решение:
α = ОС + (i + s) = 0° 12,3′ + 1,2′ = 0° 13,5′
D = 1,86 (135 : 13,5) = 18,6 м. мили.
Необходимо отметить, что этот способ не очень точен, и использовать его в яхтинге, повторяю, нужно только тогда, когда другой возможности определения места судна в море у вас нет.
Но самым надёжным навигационным методом определения места судна по расстояниям до объектов на море является радиолокационный. То есть, мы снимаем дистанции с радара. Однако при описании этого навигационного метода определения места судна в море необходимо остановиться на некоторых особенностях использования локатора в яхтинге. Это очень важно, потому что незнание таких особенностей может привести к неверному, ошибочному измерению, и место яхты будет определено неправильно. А нам это совсем не нужно. Тут всё упирается в технические характеристики самого радара.
Дело в том, что он по-разному «изображает» на своём дисплее разные поверхности, от которых отражается посланный антенной луч. Очень хорошо, чётко, отображаются высокие, обрывистые берега, разнообразные бетонные и металлические конструкции достаточно большого размера. И совсем плохо — песчаные низкие берега, всякие там мангровые заросли и малые, пусть даже металлические объекты, имеющие плавные формы. Вот, в общем-то, и вся хитрость .
А посему, перед тем, как определять в яхтинге расстояние до какого-либо объекта, обозначенного на карте и удобного для навигационного метода определения места судна по расстояниям, необходимо, прежде всего, на эту самую карту внимательно посмотреть, и определить, с каким объектом мы имеем дело, как он будет отражать луч нашего радара. По-умному это называется: какой отражательной способностью обладает объект. А на карте указаны и характер берега, и высота его среза над уровнем моря, и даже, иногда, материал, из которого он изготовлен.
Словом, вся информация есть. Ну и выбираем то, что повыше и потвёрже. Так-то оно надёжнее будет. Особое внимание уделим буям. Они хоть и железные, но в радар не всегда хорошо видны, если не оборудованы так называемым радиолокационным отражателем. Этот отражатель на карте также обозначается специальным символом, и мы всегда стараемся выбирать буи, где таковой символ имеется.
Отметим ещё так называемые точечные ориентиры. К ним относятся те самые буи и маленькие островки. Положение их на карте и местности таково, что при использовании в яхтинге навигационного метода определения места судна по расстояниям вероятность ошибок снижается, за что они так любимы яхтсменами. НО! Всегда помните, что остров-то никуда, по большому счёту, не денется (это надёжный ориентир), а вот буй, по разным причинам, может оказаться и в другом месте (быть переставленным или смещённым со своей позиции в результате сильного шторма или какой-либо аварии). Это уже, во многом, вопрос добросовестной корректуры коллекции карт, но и информация от гидрографических служб всегда приходит на суда с некоторым запозданием. Посему к буям всегда относимся с некоторой долей осторожности и подозрительности. Их нужно надёжно и тщательно опознавать перед использованием.
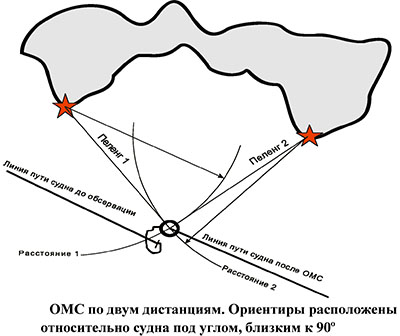
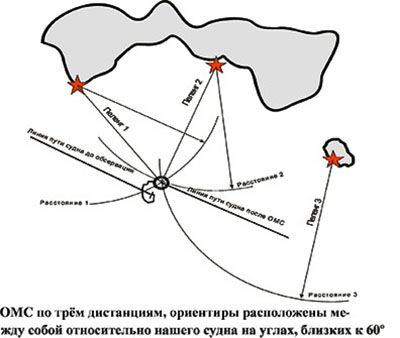
Теперь о выборе в яхтинге местоположения самих ориентиров. Тут действует похожее правило — дуги окружностей измеренных расстояний должны пересекаться под углом, наиболее близким к 90° при навигационном методе определения места судна в море по двум пеленгам, и наиболее близким к 60° и 120° при определении места судна в море по трём пеленгам. Ну а практически это выглядит, как и при навигационном методе определения места судна по пеленгам, то есть пеленги на выбранные объекты располагаются один относительно другого под тем же углом, под каким должны пересекаться дуги окружностей.
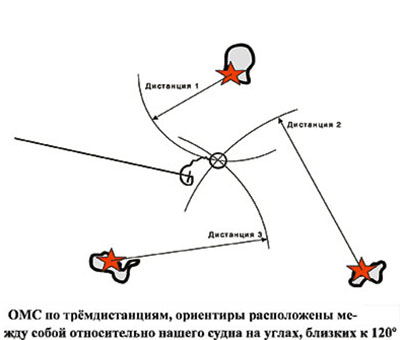
Причина этого правила та же, что и при навигационном методе определения места судна в яхтинге по пеленгам. Чем острее или тупее угол, тем больше зона возможных ошибок (см.статью).
Точно так же важна в яхтинге и последовательность пеленгования. Только теперь сначала измеряются дистанции до ориентиров, находящихся ближе к траверзу, а затем — до ориентиров, находящихся на близких к ДП яхты курсовых углах. Это потому, что расстояния до траверзных ориентиров меняются медленнее, чем до ориентиров, лежащих ближе к ДП.
Вообще, для любых навигационных методов определения места судна в яхтинге всегда действует правило:
В первую очередь измеряются те из значений навигационных параметров (пеленги, дистанции и т.п.), которые, при движении судна, изменяются во времени медленнее. В последнюю очередь — те, которые изменяются быстрее.
Технически метод выполняется просто. Измеряем дистанцию. Затем используем циркуль (не измеритель!). Циркулем снимаем с рамки карты (а этому мы уже научились) полученное расстояние, иглу циркуля утыкаем в наш объект, дистанцию до которого мы измеряли, и, не меняя раствора (то есть — не изменяя положение ножек циркуля друг относительно друга), откладываем дугу окружности в районе предполагаемого места. В пересечении таких дуг расстояний, построенных «из ориентиров» — место нашего судна. Иногда в яхтинге нужно приводить измерения к одному моменту наблюдений. И причины этой необходимости, и методы, описаны в разделе определения места судна в море по пеленгам. Никакой разницы ни в последовательности измерений, ни в самих расчётах.
При навигационном методе определения места судна в море по трём дистанциям также образуются треугольники погрешностей. На практике в яхтинге место полагают в середине такого треугольника, если он невелик. Если же треугольник получается большой, то либо сняты ошибочные отсчёты, либо неверно опознаны ориентиры.
![определение места судна в яхтинге по крюйс-расстоянию]()
Определение места судна в море по крюйс-расстоянию.
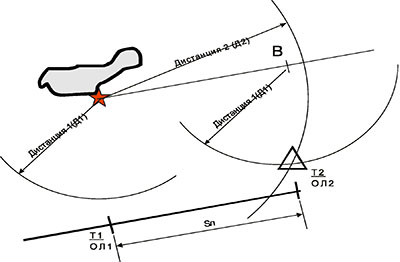
Метод определения места судна в море по крюйс-расстоянию не очень распространён в яхтинге, как и, по правде говоря, все остальные «крюйсы». Тем более, что полученная в результате точка не является, строго говоря, обсервованной. Она является счислимо-обсервованной. Его, теоретически, используют, когда есть возможность измерить расстояние, а вот пеленг — нет. Например, если неисправен компас. (Хотя, в наше время такую ситуацию в яхтинге представить себе нелегко). Но разберём и его.
В навигационном методе определения места судна в море по крюйс-расстоянию измеряют дистанцию до ориентира, а потом, через определённое время, снова дистанцию до этого же ориентира. Соответственно, на каждый момент измерений замечают время T1, Т2 и отсчёт лага OЛ1 и OЛ2. Ну и выполняют построения на карте, а именно:
1) Из ориентира проводят линию, параллельную проложенной на карте линии пути яхты.
2) На полученной линии в направлении пути откладывают расстояние, пройденное яхтой по лагу от момента первых измерений до момента вторых измерений (Sл). Его, как всегда, высчитывают по формуле: Sл = РОЛ = OЛ2 — ОЛ1 . Это, если у лага нет поправки. А если поправка лага есть, то: Sл= РОЛ * (1+ΔЛ/100) . Получают точку В.
3) Из полученной в результате точки на параллельной пути судна линии, отложенной от ориентира (точки В), откладывают расстояние, полученное в результате первых измерений (Д1).
4) Из центра самого ориентира откладывают дистанцию, полученную в результате вторых измерений (Д2).
5) В пересечении Д1 и Д2 получаем счислимо-обсервованное место своего судна.
Для лучшей эффективности этого навигационного метода определения места судна в море следует выбирать промежуток времени между наблюдениями таким, чтобы дуги окружностей (с радиусами Д1 и Д2) пересекались под углом, большим, чем 30°. Ясно, что положение нашего ориентира и точка В должны находиться под углом, большим 30° относительно яхты.
На этом закончим. А в следующей статье рассмотрим навигационные методы определения места судна в море по пеленгу и дистанции.

В переводе с латинского слово навигация означает плавание на корабле, а слово лоция имеет голландское происхождение и переводится, как управление кораблём. Следовательно, навигация, как наука, изучает методы и способы осуществления плавания судна по выбранным безопасным путям с наивысшей точностью. Лоция же изучает способы и методы выбора этих самых безопасных путей с помощью навигационных карт, пособий для плавания и источников метеорологической информации. Вообще же практически эти две науки составляют одно неразрывное целое, и мы далее для краткости и ясности будем говорить просто — навигация, имея в виду и то и другое.
Навигация в яхтинге это прежде всего умение ориентироваться в море, определять, где находится твоё судно, уметь нанести это место на карту и контролировать курс. Для выполнения таких задач необходимо чётко понимать, что представляет из себя наша планета Земля, как она движется, как люди научились изображать её и её части на бумаге — то есть как создаются навигационные карты, как этими картами пользоваться.
ФОРМА И РАЗМЕРЫ ЗЕМЛИ.
Необычайно занимательны древнейшие представления людей о форме нашей Земли. Сначала они полагали Землю плоской и имеющей край. Затем, наверное, обратив, всё-таки, внимание на скрывающиеся в пути за горизонтом предметы, пришли к куполообразной форме. Всё это грандиозное сооружение последовательно держалось на трёх китах, трёх слонах, плечах атлантов и тому подобных не инженерных конструкциях. Правда, справедливости ради следует признать, что некоторые, наиболее «продвинутые», представители тогдашней науки всё-таки догадывались, что Земля просто-напросто круглая, но предпочитали об этом помалкивать, дабы не оказаться на костре, который поджидал в те далёкие времена инакомыслящих. Позже, когда мнение о земной округлости потихоньку укоренилось среди учёных мужей, разгорелись дискуссии на тему — почему Солнце, Луна и звёзды движутся по небу и как это происходит.
Немало времени потребовалось, чтобы люди пришли к современному представлению об устройстве Солнечной системы. Итак, на сегодняшний день, в науке принято считать, что Земля круглая, вращается вместе с другими планетами Солнечной Системы вокруг Солнца, которое, в свою очередь, вращается вокруг центра Галактики, ну и так далее до бесконечности. Впрочем, законы космоса нас не очень интересуют, ими занимается мореходная астрономия — отдельная наука, понятие о которой также жизненно необходимо, если ты собрался ходить на яхте по морям.
Мы же поговорим сейчас о нашей матушке-Земле. Форма её, строго говоря, не очень правильна. Ещё в позапрошлом веке было установлено, что Земля имеет особую, свойственную только ей форму. Эта форма называется геоид. Геоид близок по форме к эллипсоиду вращения — правильной геометрической фигуре, полученной вращением эллипса вокруг одной из своих осей.
Поэтому для практических целей принято считать, что земля имеет форму эллипсоида вращения. Так удобнее составлять карты и решать навигационные и астрономические задачи в яхтинге.
Но коль скоро земной эллипсоид вращения — искусственно принятое для работы геометрическое тело, то его элементы должны быть рассчитаны максимально более близкими к реальным размерам земного шара.

Разница между длинами большой и малой полуосей эллипсоида невелика. Она составляет 21,38 км. Понятно, что, по сравнению с размерами самой Земли, эта величина — ничтожно мала. На этом основании в практической навигации Земля, во втором приближении, принимается за шар, объём которого равен объёму земного эллипсоида.
Все эти заморочки с земным эллипсоидом в практической работе не очень и нужны. Однако если среди моряков, знающих, что это такое, возникнет разговор , его неплохо бы уметь поддержать, имея представление о предмете.
Я не буду данную статью загружать лишними формулами , поэтому просто назову величину радиуса Земли , принятую для практической навигации. Он будет равен приблизительно 6 371 109,7 метрам или 6 371,1 километра. Эта величина ещё не один раз понадобиться нам для расчетов.
В процессе плавания по морям и океанам яхтсмену ,в основном, приходится сталкиваться с измерением направлений в море(углов в градусах) и расстояний (в метрах). Сразу как-то хочется увязать всё это в одну понятную и простую целостную систему. Как этот вопрос решается в яхтенной навигации? В принципе, несложно. Сейчас рассмотрим на первый взгляд, простые, но самые главные, основополагающие понятия морской навигации!
Итак, мы знаем, что направления в море измеряются в углах, а один полный оборот чего бы то ни было вокруг своей оси называется поворотом на 360 градусов. Эти самые градусы, и помогают нам ориентироваться на местности. Мы абсолютно всегда как бы находимся внутри такого вот круга, мысленно рисуем его, направляя (ориентируя) на север отметкой 0 — 360 градусов. Точно такие же круги рисуют и на навигационных картах. А пока нам необходимо крепко вбить себе в голову само понятие, принцип ориентирования:
- круг состоит из 360 градусов;
- мы условно всегда находимся в центре такого воображаемого круга;
- необходимо помнить, что наш круг началом своего отсчёта смотрит на север (начало отсчёта — это 0-360 градусов — оно же и конец отсчёта);
- нужно просто запомнить и представлять себе чётко, что когда мы смотрим на север, мы смотрим на 0 градусов; в это время слева у нас — запад (или 270 градусов), справа — восток (или 90 градусов), а сзади — юг (или 180 градусов);
- наша Земля — круглая (грубо говоря), но очень большая, и то, что мы видим, представляется нам плоским, поэтому, где бы мы ни находились, пользуемся описанной выше системой ориентирования, допуская, что Земля в месте нашего нахождения — плоская.
СИСТЕМЫ ДЕЛЕНИЯ ГОРИЗОНТА.
Для определения направлений в море нам необходимо разобраться в том, как принято делить горизонт в навигации. Что такое делить горизонт? Очень просто. Выше , разбивали круг на градусы, мы как раз и «делили горизонт». Причём систем деления горизонта существует несколько. Мы использовали круговую систему. Её и используют теперь. Но раньше использовались и другие системы. В частности, на парусном флоте применяли румбовый счёт. По нему весь горизонт делился на 32 румба (направления в море).

В каждом из румбов — 11,25°. Четыре из них — север (N), юг (S), запад (W), восток (Е), называются главными направлениями в море; четыре — северо-восток (NE), юго-восток (SE), юго-запад (SW), северо-запад (NW) называются четвертными. Восемь румбов, расположенных между главными и четвертными (например, NNE, ENE, ESE и т.д.) носят название трёхбуквенных румбов. Остальные шестнадцать румбов относятся к промежуточным направлениям в море.
Применение такой грубой системы было обусловлено прежде всего несовершенством магнитных компасов. Они просто-напросто физически не могли «делать свою работу» точнее. С появлением более точных компасов, с возрастанием скоростей морских судов, горизонт стали делить точнее — на 360 градусов. Однако и старая система пригодилась. Её используют при указании направлений ветров, течений и движения волн в море.
НАПРАВЛЕНИЯ В МОРЕ.
Ну вот, мы подошли уже непосредственно к самому важному в яхтенной навигации — понятиям видов направлений в море. На них, собственно, и строится вся эта наука. А в принципе, если не умничать особенно, так ничего запредельно сложного нет и здесь. Направления в море на предметы (и вообще на всё, что угодно), отсчитываемые от севера называются пеленгами. А если мы перемещаемся куда-нибудь , то следуем курсом, и как бы «таскаем» с собой наш воображаемый круг. Это очень важно представлять себе и понимать! Такой круг нарисован не только на картах, он изображён на всех морских компасах, их репитерах, и других приборах, задействованных для ориентирования в яхтинге. Кстати приборы «сами» разворачивают наши круги нулём на север.
Направления в море определяются двугранным углом между вертикальной плоскостью истинного меридиана наблюдателя и вертикальной плоскостью, проведённой через предмет, направление в море на который мы определяем.

Теперь данное определение поясним. Что такое вертикальная плоскость? Вообще это понятие относительно. Мы говорим здесь о нём потому, что оно постоянно встречается в навигационной теории. В этой теории под вертикальной плоскостью понимается плоскость, прежде всего, перпендикулярная какой либо другой плоскости.
В нашем случае — плоскости горизонта.
Мы помним, что Земля круглая, но помним и то, что для простоты расчётов принимаем её плоской в том месте, где мы в данный момент находимся. Важно помнить и то, что наша плоскость горизонта сама перпендикулярна прямой линии, проведённой через нас, как наблюдателей, и через центр Земли. А раз так, то разбираемая вертикальная плоскость тоже будет проходить через центр Земли.
Меридиан наблюдателя — это замкнутая, также близкая к окружности, линия, проходящая через самого наблюдателя и через оба полюса — северный и южный.
Плоскость, проходящая через эту «окружность» (а также и через центр Земли опять-таки) — это плоскость меридиана наблюдателя. Понятно также, что на практике никто не пользуется такими громоздкими определениями и понятиями, как «вертикальная плоскость» и т.п. На рисунке показан угол пеленга. Заметно, что если принять (как мы обычно и делаем) место нашего нахождения за плоскость, а не за купол, то наши углы «превращаются» в самые обычные плоские углы.
Теперь, когда мы поняли саму суть определения направления в море, разобрались с понятиями «вертикальная плоскость», «меридиан наблюдателя», «пеленг», можно с полным правом разбирать все остальные виды направлений в море, используя самые практические способы, а именно плоские углы и изображения на морских навигационных картах.
Однако, прежде чем к этому вплотную приступить, отметим ещё один важнейший момент. Полюсов у нашей Земли — две пары! Два северных и два южных. Это географические полюса, через которые проходит ось собственного вращения Земли и полюса магнитные, те самые, на которые пытаются (обратите внимание — только пытаются!) всегда показывать стрелки магнитных компасов.
Сейчас отметим , что направления в море бывают трёх видов — магнитные, компасные (снятые непосредственно с показаний компаса) и истинные. Отсчёт магнитных направлений в море производится от магнитного меридиана (он проходит через магнитные полюса), а отсчёт истинных направлений в море — от истинного меридиана (проходящего через полюса географические).
Итак, в яхтинге используют следующие виды направления в море — курсы, пеленги (обратные пеленги), курсовые углы.
Курс судна — это угол между северной частью плоскости истинного меридиана и диаметральной плоскостью судна. Так как мы оперируем с морскими картами, то определим курс, как угол между направлением в море на север и направлением проекции диаметральной плоскости корпуса судна на карте, отсчитываемым из кормы в нос.
Истинный пеленг (ИП) — угол между северной частью плоскости истинного меридиана и вертикальной плоскостью, проходящей через наблюдателя, центр земного шара и предмет, пеленг на который мы определяем. Для плоскости карты определение может звучать так — истинный пеленг — угол между направлением в море на север и направлением на предмет, отсчитываемый из точки местоположения нашего судна.
Говоря об истинном пеленге мы должны также помнить, что существует такое понятие, как обратный истинный пеленг. Обратный истинный пеленг — это угол, отличающийся от истинного пеленга на 180 градусов. И только.
Существует ещё один вид направления в море — курсовые углы (КУ). Это часто употребительное в яхтинге понятие. Здесь отсчёт производится от диаметральной плоскости судна в обе стороны, правую и левую, от нуля до 180 градусов.
А для лучшего уяснения значения термина курсовой угол, разберём пример. Идём мы на яхте где-то в море. Видим остров. Где? Например, слева. Значит, курсовой угол будет левого борта. (Понятно, что если справа — то правого борта).
Мысленно делим горизонт снова на градусы. Но только начало отсчёта — ноль градусов, будет не на севере, как мы делали до сих пор, а прямо по носу нашего судна. Мы также помним, что если прямо у нас — ноль, то точно слева и точно справа — по 90 градусов. А точно сзади — 180 градусов. Так вот направление в море на наш остров, отсчитываемое в градусах от нуля до 180 с указанием стороны отсчёта — это и есть курсовой угол. Если наш остров точно слева, то курсовой угол на него будет 90 градусов левого борта. Кстати говоря, состояние, когда предмет находится точно справа или точно слева на курсовых углах 90 градусов, называется, соответственно, траверзом правого или левого борта.
На этом пока закончим . Дополнительная информация будет в следующих статьях .
Автор статьи

Читайте также:
- Как избежать обязательных работ по решению суда по уголовному делу
- Неправильное построение предложения с причастным оборотом я имею поручение как от судьи
- Позиция еспч по вопросу нарушения разумных сроков судебного разбирательства
- Перенесут ли суд если заболел подсудимый
- Последствия отказа от принятия судебной повестки или иного судебного извещения