
Предотвращения столкновения судов планшет и прокладка как делать
Обновлено: 13.05.2024
12.09.2015 17:56
дата обновления страницы
Полезные советы
История изменения сайта
Расхождение судов
Опасность столкновения обнаруживается наблюдением за изменением пеленга. Если пеленг, взятый на судно, заметно не изменяется (рис. 172), это значит, что есть опасность столкновения. Если пеленг меняется на корму, значит встречное судно пройдет за кормой. Если пеленг изменяется на нос, то встречное судно пройдет впереди по курсу (рис. 173-174). Судоводитель-любитель для наблюдения за изменением пеленга может воспользоваться любыми предметами, расположенными на судне, J3 створе которых находится встречное судно в момент его обнаружения.
Рис. 172. Пеленг на приближающееся судно не меняется
Отклонение наблюдаемого судна от линии створа покажет сторону прохождения встречного судна относительно своего судна или же, если направление не меняется, укажет на опасность столкновения.
Суда с механическим двигателем уступают дорогу парусному судну. Последнее, однако, не должно преднамеренно находиться на курсе судна с механическим двигателем. Гребные шлюпки уступают дорогу парусным судам. Когда два судна с механическими двигателями идут прямо (рис. 175) или почти прямо друг на друга так, что возникает опасность столкновения, каждое судно обязано уклониться вправо, чтобы разойтись левыми бортами.
Рис. 173. Случай увеличения пеленга
Рис. 175. Расхождение судов их левыми бортами при встречных курсах
Рис. 174. Случай уменьшения пеленга
Рис. 176. Случай заблаговременного изменения курса при расхождении судов
Рис. 177. Случай позднего изменения курсов судов при расхождении
Это правило применяется только тогда, когда мачты (или топовые огни) встречного судна находятся в створе и прямо по носу и видны оба отличительных огня. Если два судна А и Б (рис. 176) с механическими двигателями идут пересекающимися курсами, то уступает дорогу судно А, которое видит другое судно Б со своего правого борта. При этом судно Б, которому уступают дорогу, должно идти прежним курсом и с прежней скоростью, чтобы не ввести в заблуждение водителя другого судна А.
Судно, уступающее дорогу другому судну, не имеет право не пересекать курса встречного судна, а при приближении к нему обязано изменить курс, скорость, а в случае необходимости дать задний ход. Если опасность столкновения все же не устранена, то судно, которому уступают дорогу, также должно принять все возможные меры к предотвращению столкновении (рис. 177).
Обгоняющее судно уступает дорогу обгоняемому. Обгоняющим считается судно, если оно находится позади траверза обгоняемого судна на 2 румба или ночью не видит его бортовых огней; обгоняющим оно считается до тех пор, пока не оставит обгоняемое судно позади себя. Обгоняемое судно не должно мешать маневрам обгоняющего.
Рис. 178. Правильные пути судов Л и ? на фарватере
При движении по узким проходам суда должны держаться своей правой стороны (рис. 178). Выход судна на левую сторону прохода допускается лишь при необходимости избежать столкновения, навала на сооружение, затонувшее судно, при обгоне судна, повороте на обратный курс и в случае нахождения места стоянки на противоположной стороне. В этих случаях требуется повышенная осторожность и готовность к маневру.
Все суда уступают дорогу судам, занятым рыбной ловлей, и без особой надобности не приближаются к ним, а также к судам, занятым работами, стесняющими их маневрирование. Это, однако, не дает права рыболовным судам загромождать фарватеры, по которым идут другие суда, кроме рыболовных.
Тесты для расхождения судов с использованием РЛС
Столкновение морских судов, их причины и предупреждение
Сборник задач по использованию РЛС для предупреждения столкновенеие судов
Использование РЛС при расхождении судов
Рекомендации по использованию РЛС для ПСС
Рекомендации по использованию РЛС
РЛС и МППСС
Предотвращение навигационных аварий морских судов
Практическое пособие по использованию САРП
Комментарии к МППСС-72
Использование РЛС в судовождении
Прокладка на маневренном планшете
Обозначения на САРП
Материалы для изучения МППСС-72
Руководство по правилам предупреждения столкновения судов
Методичка: решение задач на планшете
Маневренный Планшет
Сборник задач по управлению судами
Справочник-экзаменатор МПСС-72 по огням и знакам
Маневрирование для предупреждения столкновений в море
Рекомендации по использованию судовых станций Автоматической Идентификационной Системы (AIS) для решения задач предупреждения столкновений судов
Тактическое маневрирование
Задачи навигации и управления при стабилизации судна на траектории
Расхождение судов
Поддержка решений по расхождению с судами
Использование РЛС и САРП при расхождении судов
От единыя купели Крещения, еже при святем князе Владимире, мы, чада Твои, благодать восприяхом, – дух братолюбия и мира в сердцах наших навеки утверди!
Иноплеменным же языком, брани хотящим и на Святую Русь ополчающимся, – запрети и замыслы их ниспровергни.
Благодатию Твоею власть предержащих ко всякому благу настави, воинов – в заповедях Твоих утверди, лишенныя крова – в домы введи, голодныя – напитай, недугующая и страждущая – укрепи и исцели, в смятении и печали сущим – надежду благую и утешение подаждь, на брани убиенным – прощение грехов и блаженное упокоение сотвори.
Для предотвращения столкновения судов, происходящих при использовании САРП, необходимо:
1. Разработать и утвердить правила технической и навигационной эксплуатации САРП в качестве стандарта предприятия (пароходства). Эта работа в НМП произведена. Разработанный нами «Стандарт предприятия по САРП» после обсуждения на судах утвержден в качестве официального документа пароходства;
2. Разработать и утвердить методику определения поправок (погрешностей) САРП;
3. Разработать и утвердить информацию для капитанов по определению безопасных дистанций между расходящимися судами для начала маневра скоростью (на судах НМП типа «Крым», «Победа» и других такая информация, разработанная НГМА, уже утверждена);
4. Производить обучение курсантов и судоводителей на тренажерах по методике деловых игр с использованием конкретных аварийных ситуаций, связанных со столкновением судов, добиваясь показа допущенных ошибок и способов их предотвращения с использованием САРП.
5. Дополнить информацию о маневренных качествах судов сведениями об эффективности маневров и закономерностях изменения скоростей и пройденных расстояний;
6. Увеличить количество учебных часов на изучение САРП за счет сокращения числа часов, отведенных на изучение других дисциплин.
7. Ввести в учебный процесс изучение динамики, кинематики процесса расхождения, теории определения безопасных дистанций для начала маневра по предупреждению столкновения судов, закономерностей изменения пеленгов и других параметров расхождения (в НГМА с этой целью проф. С.Б. Ольшамовским по решению Ученого совета академии введена специальная дисциплина «Научные исследования в области безопасности мореплавания», разработана программа, курс лекций и практических занятий);
8. Обратиться в ИМО с просьбой о внесении изменений в МППСС-72 в связи с массовым внедрением САРП на судах мирового флота, для того чтобы узаконить применение этого прибора для целей расхождения судов и предупреждения столкновений, а также узаконить расхождение скоростных судов (СПК, СВП, экранопланов) в положении на крыльях и воздушной подушке с водоизмещаюшими судами. Предоставить им при необходимости права маневрировать при появлении опасности столкновения при расхождении, а на водоизмещающие суда распространить при этом действие правила 17, т.е. на суда, которым уступают дорогу;
9. При разработке технических заданий на создание новых САРП необходимо предусмотреть автоматизацию операции по определению характера расхождения, являющуюся источником появления ошибок при интерпретации информации САРП, сопроводив дистанцию кратчайшего сближения символами, указывающими, с какого борта находится Дкр, например, +Дкр - с правого борта судна-наблюдателя, а –Дкр - с левого борта. Кроме того, необходимо дополнить информацию САРП сведениями, указывающими, на каком расстоянии судно-наблюдатель пересечет линию курса приближающегося судна Lп.к, сопроводив ее символами, обозначающими, по носу или по корме располагается Lп.к, например, мигание цифр Lп.к указывает на опасное пересечение курса по носу;
10. Увеличить в САРП число проигрываемых маневров скоростью с одного до трех, распространив их на маневры «Подтормаживание», «Пассивное торможение» и «Активное торможение».
Реализация перечисленных рекомендаций и предложений повысит культуру судовождения, безопасность мореплавания и будет способствовать предупреждению столкновений судов в море.
1. Ольшамовский С. Б. Повышение безопасности мореплавания, ч. 1,2. Новороссийск, РИО НГМА, 2000 г.
2. Ольшамовский С.Б., Федченко Г. Н., Мордвинцев В. В. Исследование причин столкновения парохода «Адмирал Нахимов» с теплоходом «Петр Васев». (Морской транспорт. Серия «Судовождение, связь и безопасность мореплавания»: Экспресс-информация.- М.: В/О «Мортехинформреклама», 1993, вып. 8 (291), с.1-42.
3. Юдович А. Б. Уроки катастрофы. (Морской транспорт. Серия «Судовождение, связь и безопасность мореплавания»: Экспресс-информация.- М.: В/О «Мортехинформреклама», 1990, вып. 16 (225), с.1-11.
На основании проведенных исследований причин столкновения п/х «Адмирал Нахимов» с т/х «ПетрВасев» и других столкновений крупнотоннажных судов при использовании САРП можно сформулировать рекомендации судоводителям по их предупреждению.
К использованию САРП должны допускаться только судоводители, отвечающие за ходовую вахту, прошедшие специальную подготовку и имеющие соответствующие удостоверения.
Судоводители должны уметь производить проверки, указывающие на нормальную работу САРП, определять и знать поправки и погрешности навигационной информации (формуляра и векторов), помня, что чрезмерное доверие к информации САРП - опасно, особенно при расхождении крупнотоннажных судов на пересекающихся курсах под острыми курсовыми углами, когда погрешности САРП достигают максимальных значений.
При движении судов в одном направлении с небольшой разностью скоростей относительная скорость и перемещение объекта, определяемые САРП, являются менее всего достоверными, а изменения курса маскируются и могут быть замечены с большим опозданием и с большими погрешностями. Погрешности САРП возрастают при качке, волнении, дожде и снегопаде. Возможны потери объектов и необнаружение объектов со слабыми отраженными сигналами. При сближении объектов на небольшие расстояния или при крупном волнении может происходить «обмен» объектов (переход строба сопровождения на отметку волны или другое судно). Критериями нормальной работы САРП, кроме указанных в инструкции по эксплуатации, являются: стабильность траектории движущегося объекта и быстрое распознавание перемещения его отметки на экране САРП, а также отсутствие разности показаний одних и тех же величин в режимах ЛИД и ЛОД. Появление у неподвижных объектов векторов в режиме работы САРП ЛИД при одинаковых показаниях абсолютного и относительного лагов (отсутствует течение) указывает на наличие ошибок в системе сопровождения. Судоводители должны, руководствуясь правилами 5 и 7 (а), (b) МППСС-72, дополнять и контролировать информацию САРП во время расхождения судов визуальным и слуховым наблюдениями, визуальными и радиолокационными пеленгами, радиолокационной прокладкой, а при необходимости и информацией о параметрах движения и расхождения приближающегося судна, получаемой от него по радиотелефону. Во избежание ошибок в интерпретации информации САРП судоводители должны знать возможности режимов работы ЛОД и ЛИД, закономерности изменения пеленгов и возможности необнаружения их при расхождении на пресекающихся курсах и небольших величинах Дкр.
Автоматическая радиолокационная прокладка при расхождении судов с использованием САРП должна иметь целью решение трех основных задач:
1. Своевременного определения опасности столкновения с приближающимся судном в соответствии с требованиями правила 7 МППСС-72;
2. Своевременного выбора мер (действий) для предупреждения
столкновения судов или вида маневра в соответствии с требованиями
правила 8, а также правил 13 (обгон), 14, 15, 17 (а), (и), 18 (а), когда суда
находятся на виду друг у друга, и правила 19 МППСС-72 при плавании
судов при ограниченной видимости; .
3. Определения момента начала маневра для предупреждения столкновения судов в соответствии с требованиями правила 16 для судна, уступающего дорогу, и правила 17 (о) МППСС-72 для судна, которому уступают дорогу.
Для решения перечисленных задач и обеспечения безопасного расхождения судов предварительная автоматическая радиолокационная прокладка должна включать следующие операции:
1. Автоматическое и визуальное обнаружение движущихся объектов-целей в зоне, окружающей судно.
2. Автоматическое и ручное взятие на автосопровождение отметки объекта, что достигается в момент пересечения отметкой охранного кольца, устанавливаемого судоводителем на выбранной дальности (больше 10 м.м.). При ручном захвате на автосопровождение маркер совмещается с центром отметки и рядом с маркером появляется символ (знак) сопровождения. При автосопровождении происходит непрерывное изменение пеленга и дистанции приближающегося судна;
3. Автоматическое определение параметров движения (скорости и курса) приближающегося и своего судов и выработка векторов перемещения через одну минуту после начала сопровождения;
4. Автоматическое определение параметров расхождения судов - дистанции Дкр и времени tкр, кратчайшего сближения (через 2-3 мин после начала сопровождения) и получение цифрового формуляра цели, включающего относительные координаты судна-цели (пеленг, дистанция), его курс, скорость, дистанцию кратчайшего сближения и время кратчайшего сближения судов.
5. Определение характера расхождения при условии сохранения скоростей и курсов обоими судами (по носу или корме пройдет наше судно у приближающегося судна), что достигается прогнозом движения судов (увеличением длины ЛОД) на время, не меньше, чем величина tкр, и независимо от него наблюдениями за изменениями пеленгов на приближающееся судно. Определение характера расхождения производится только в относительном режиме работы САРП (режим ЛОД).
Если ЛОД пересекает отметку (линию) курса и пеленг заметно изменяется в сторону носа судна, то приближающееся пройдет по носу; если ЛОД не пересекает отметку (линию) курса и пеленг заметно изменяется в сторону кормы, то встречное судно пройдет по корме; если ЛОД проходит по центру экрана или вблизи его, и пеленг не изменяется или изменяется незначительно, то существует угроза столкновения судов.
Располагая достоверной информацией о направлении заметного изменения пеленгов, о положении ЛОД в отношении центра экрана (отметки нашего судна) и отметки курса судна, о величинах Дкр и tкр, судоводитель принимает решение об отсутствии или наличии опасности столкновения, руководствуясь правилом 7 МППСС-72. Следует отметить, что правило 7 (а) при определении наличия опасности столкновения требует, прежде всего, учитывать характер изменения или постоянство пеленгов. В открытом море безопасным можно считать расхождение, если САРП показывает Дкр больше или равно 2 м.м, в местах с интенсивным движением судов - при Дкр больше или равно 1 м.м, если пеленги заметно изменяются.
Если опасность столкновения судов не существует, то на этом предварительная автоматическая радиолокационная прокладка заканчивается, и режим работы САРП рекомендуется перевести с ЛОД на ЛИД, так как необходимый контроль за поведением приближающегося судна по положению векторов его истинного движения более точен и эффективен. Необходимо учитывать, что приближающееся судно может не иметь САРП и даже РЛС и скорость обработки навигационной информации у него может быть недостаточной для правильной оценки ситуации расхождения. В этом случае ускоренная радиолокационная прокладка может быть произведена в течение не более 1 мин, если по радиотелефону от приближающегося судна будет получена информация о пеленге (ИП), дистанции (Д), его скорости (V) и курсе (ИК). После чего, отложив от центра маневренного планшета, как показано на рис. 13, Дкр = 0,5 м.м. Следует учитывать и возможность потери управляемости судна во время расхождения из-за отказов рулевого устройства, обесточивания или отказов в энергетической установке. В практике судовождения имеется ряд аварий, указывающих на то, что в перечисленных случаях при расхождении на Дкр = 0,5 м.м. крупнотоннажным судам предотвратить столкновение не удалось, и последствия столкновения были очень тяжелыми. Судоводителям рекомендуется избегать расхождения Дкр = 0,5 м.м.
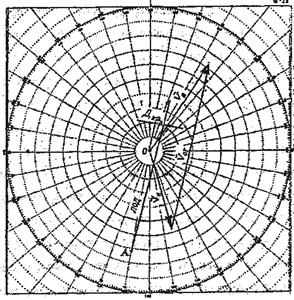
Рис. 13. Пример радиолокационной прокладки п/х «Адмирал Нахимов», которая могла быть выполнена по информации «Петр Васев», полученной по радиотелефону
О – п/х «Адмирал Нахимов» в 22.47; А - т/х «Петр Врсев» в 22,47;VВ - вектор скорости т/х «Петр Васев» - 11,3 уз; Vh - вектор скорости п/х «Адмирал Нахимов» - 9уз; Vот - вектор скорости относительного движения; Дкр, - дистанция кратчайшего сближения
Если опасность столкновения существует, тоавтоматическая радиолокационная прокладка продолжается с целью определения мер по предупреждению столкновения или вида маневра и определения момента начала маневра. Автоматическая прокладка на этой стадии позволяет для ситуации расхождения, когда существует опасность столкновения, определить в ускоренном масштабе времени новые параметры безопасного расхождение (Дкр и tкр) при выбранном судоводителем уступающего дорогу судна маневре. В результате этой шестой операции автоматической радиолокационной прокладки, которая получила название «Проигрывание маневра», судоводитель получает от САРП информацию о безопасном расхождении судов при выбранном маневре.
В соответствии с требованиями правила 8 (б) для предупреждения столкновения должен быть выбран один из следующих маневров: маневр курсом (отворот на несколько десятков градусов) или маневр скоростью подтормаживание (уменьшение скорости до самого малого хода), пассивное торможение (остановка главного двигателя), активное торможение. Наиболее целесообразным, эффективным и распространенным видом маневра при расхождении является маневр курсом. Маневр скоростью рекомендуется применять в тех случаях, когда маневр курсом по той или иной причине применить невозможно из-за наличия навигационной опасности, помех от других судов, при следовании крупнотоннажного судна в море по глубоководному фарватеру, и в других случаях. При этом маневр подтормаживания применяется только в тех случаях, когда в процессе расхождения требуется сохранение управляемости судна, например, из-за действия бортового ветра или сноса от течения. Маневр пассивного торможения применяется, когда перечисленные факторы отсутствуют, но при работе двигателя на задний ход судно имеет значительное уклонение от линии курса (3-4 кб), что при данных условиях недопустимо, например, из-за угрозы посадки на мель. В остальных случаях должно быть применено активное торможение, с работой двигателя на полный задний ход. Начало выбранного маневра скоростью крупнотоннажных судов должно производиться по безопасной дистанции, определяемой по трехмерному графику, аналогичному рис. 10-12. Выбору маневра предшествует установка на индикаторе САРП времени запаздывания маневра tзап, необходимого для подготовки к выполнению маневра. При выборе направления поворота при маневре курсом рекомендуется отдавать предпочтение повороту под корму судна, которому уступают дорогу.
Определение величины угла поворота производится во многих САРП в результате автоматической прокладки маневра, обеспечивающего заданную судоводителем Дкр. Время запаздывания маневра принимается равным 1-6 мин. После осуществления выбранного маневра курсом следует осуществить новую автоматическую радиолокационную прокладку, чтобы убедиться в адекватности проигрываемого и реального маневров (седьмая операция).
Заканчивается автоматическая прокладка восьмой операцией - исполнительной автоматической радиолокационной прокладкой траектории движения судна, которому уступают дорогу, с целью контроля его движения. При этом САРП должен быть включен в режиме ЛИД. Аналогично производится и контроль за движением других судов, угроза столкновения, с которыми ранее не существовала.
Если для крупнотоннажного судна, которому уступают дорогу, становится очевидным, что столкновения нельзя избежать только действиями уступающего дорогу судна, то оно должно в соответствии с правилом 17 (a) (ii) и (Ь) начать маневр отворота с перекладкой руля на борт в сторону, противоположную грозящей опасности, на дистанции между судами не менее 1,5 мили.
Водный транспорт, теория и практика, все о морских и речных судах
20.05.2015 21:45
дата обновления страницы
Метод графической прокладки
Графическая прокладка дает более точную информацию о ситуации судов и выполняется на маневренном планшете М-78 (рис 212)
Задача на расхождение состоит из: 1) нанесения начальной ситуации на планшет и построения треугольников скоростей векторов относительной скорости;
2) оценки ситуации опасного сближения (столкновения) с судами, эхо-сигналы которых наблюдаются на экране РЛС, путем расчета времени кратчайшего сближения /кр, пересечения /"ер, дистанции кратчайшего сближения DKр и выявления их реальной и потенциальной опасностей;
3) выбора и обоснования маневра, выделения судов, с которыми необходимо расходиться;
4) расчета выбранного маневра с помощью графического перестроения векторных треугольников начальной ситуации;
5) расчета момента начала маневра (с учетом маневренных элементов
судна), выбирается упрежденное время (3 или 6 мин), дистанция расхождения, время расхождения и дистанция отхода от своего первоначального курса за время маневрирования;
6) нанесение ожидаемой линии относительного движения (ОЛОД) и последующий контроль за перемещением судна-цели (наблюдаемого судна).
Рассмотрим подробно процесс решения задачи на расхождение с помощью графической (радиолокационной) прокладки на маневренном планшете.
1. Для удобства расчетов интервал времени принимает 3 или 6 мин, т е. 1/20 или 1/10 ч.
2. Строим на планшете из его центра вектор курса и скорости VL нашего судна.
Рис. 212 Маневренный планшет
Рис. 213. Решение задачи на расхождение с помощью графической прокладки
Рис 214 Определение потенциальной опасности и местоположения судна, для расхождения с которым требуется произвести расчет маневра
3. С появлением на экране РЛС эхо-сигналов определяем их пеленги и дистанции и наносим на планшет.
4. Через равные интервалы времени (3 или 6 мин) в прежней последовательности наносим следующие точки и после их соединения получим векторы относительной скорости.
5. При этих векторах строим векторные треугольники, для чего Vc своего судна из центра планшета переносим в первую точку L Соединив начало своего вектора Vc со второй точкой 2, получим вектор скорости наблюдаемого судна W
6. Линию, соединяющую точки 1 и 2, продлим за центр планшета, получим ЛОД.
Оценка ситуации заключается в определении степени опасности столкновения судов. Находим кратчайшее расстояние DKp, опуская перпендикуляр из центра планшета до ЛОД и точку пересечения курса судна-цели Dnep, для чего проводим из центра планшета линию, параллельную вектору скорости У" суд-на-цели до пересечения с ЛОД
Выявление потенциальной скорости судов можно осуществить двумя способами:
1) проигрываем маневр нашего судна (Vc) или судна-цели (V") и определяем по изменению ЛОД и Vo возможный переход из потенциальной опасности в реальную. Изменение курса, скорости или комбинированный маневр нашего судна вправо ухудшает ситуацию с судном "б". В данном случае маневр необходим с судном "б" (рис. 214);
2) использованием особенностей перемещения эхо-сигналов в относительном движении на экране РЛС, что было подробно разобрано при визуальном методе оценки ситуации.
Для выбора и обоснования вида маневра проигрывают все возможные его варианты: изменение курса, скорости или того и другого одновременно При этом учитываются все факторы, сопутствующие плаванию в условиях ограниченной видимости, навигационных особенностей района плавания, МППСС-72 и маневренных возможностей своего судна и возможного маневра судна-цели. Судоводитель должен стремиться к безопасному расхождению приемлемым вариантом Расчет маневра можно производить при помощи палетки и линейки. Он сводит к минимуму графическую работу по одному-двум судам. На рис. 215 выполнен расчет маневра для безопасного расхождения изменением своего курса вправо. Положение упрежденных точек не оказывает влияния на методику расчета с использованием векторных треугольников начальной ситуации. Следует всегда помнить, что момент упрежденной точки есть условный момент окончания маневра.
Момент начала маневра своего судна рассчитывается с учетом маневренных элементов судна (инерция, торможения, поворотливость и т. д.).
" width="340" height="236" />
Рис. 215 Расчет маневра для расхождения изменением курса вправо; расчет выполнен с судном "б"
В векторном треугольнике судна "а" вектор нашей скорости поворачиваем вправо на рассчитанный угол. Получаем новый вектор относительной скорости Vo и соединяем точку _2 с концом повернутого вектора Vq. Параллельно вектору относительной скорости V'o из упрежденной точки проводим ОЛОД судна "а". Упрежденная точка берется за один и тот же интервал времени. После этого можно определить время расхождения судов tpicx и дистанцию отхода D0тх от курса нашего судна (см. рис. 215).
Для расчета используем новый вектор относительной скорости W Дистанция отхода рассчитывается на планшете. Для этого на линии нашего нового курса, проложенного из центра планшета, откладываем расстояние, которое пройдет наше судно за время расхождения. Затем из полученной точки опускаем перпендикуляр на линию первоначального курса. Отрезок этого перпендикуляра будет дистанцией отхода от курса в масштабе планшета.
Результат маневрирования контролируется с помощью ОЛОД. На планшет наносится не только ОЛОД судна, относительно которого рассчитан маневр, но и других судов, которые представляют потенциальную опасность. Эти линии ожидаемого относительного движения проводятся для контроля за развивающейся ситуацией после маневра, чтобы своевременно обнаружить маневр других судов, а также в случае допущенных ошибок в расчетах и графических построениях.
Из вышеизложенного видим, что оба метода взаимосвязаны и дополняют друг друга, обеспечивают решение задач на безопасное расхождение судов с помощью РЛС в условиях ограниченной видимости.
На некоторых судах над экраном РЛС установлен зеркальный планшет. Это вспомогательное устройство, являющееся беспаралаксной оптической системой. Преимущество зеркального планшета в том, что он дает возможность вести графическую прокладку, не прерывая наблюдения на экране РЛС.
Периодически повышая квалификацию, судоводители морского флота проходят тренировочные учения по решению задач на радиолокационных тренажерах.

Средства для чистки катеров

Чистка ультразвуком

Чистка ультразвуком

Чистка инжектора, форсунок

Очистка инжектора, форсунок

Тестирование форсунок

Промывка форсунок

Очистители деталей, УЗО

Очистка меди и бронзы
Автор статьи

Читайте также:
- Третейский суд как механизм разрешения внутренних инвестиционных споров
- Обжалование судебных постановлений в апелляционном порядке курсовая
- Государство в условиях рынка заботится о нетрудоспособных гражданах
- Обжалование решения третейского суда в суде общей юрисдикции
- Иск о признании записи в егрп недействительной образец