
Виды авторулевых на судах
Обновлено: 25.04.2024
Внедрение авторулевых на морских судах дало возможность получить значительный экономический эффект. Автоматическое управление рулем обеспечивает повышение точности удержания судна на курсе не менее, чем в 2 раза, сокращение ходового времени и увеличение скорости на 3% и снижение до 30-40% нагрузки рулевой машины.
Кроме того, при плавании в открытом море авторулевой освобождает рулевого матроса от утомительного труда по удержанию судна на курсе, а при дальнейшей автоматизации процессов судовождения приведет к сокращению экипажа.
Раньше на транспортных судах устанавливались несколько типов авторулевых - АБР-1, АБР-3, АР-1 и др. Авторулевые АБР-1 и АБР-3 были разработаны для определенных судов и рулевых машин.
Первый из них предназначен для электрогидравлической рулевой машины судов типа «Казбек». Его опытный образец был установлен на теплоходе «Жданов».
Авторулевой АБР-3 спроектирован для паровых рулевых машин судов типа «Ленинград» и «Донбасс». Опытные образцы этого авторулевого устанавливались на пароходах «Шишков» и «Красногвардеец».
В 1961 году морские пароходства получали большую партию авторулевых для установки их на судах типа «Казбек», «Ленинград» и «Донбасс». Одновременно с этим был решен вопрос применения авторулевого АБР-1 на таких типах судов, как «Михаил Калинин», «Андижан», «Самед Воргун» и рудовоз 8600 г. Конструкторами были разработаны технические проекты установки и привязки авторулевого АБР-1 к рулевым машинам указанных судов.
Выходом авторулевого АБР-1 является электромашинный усилитель типа ЭМУ-5А, имеющий на генераторе номинальное напряжение 110в, мощность 0,5 квт. Генератор питает исполнительный электродвигатель системы управления рулевой машиной.
На судах типа «Михаил Калинин», «Самед Воргун» и рудовозе 8600 г устанавливались электрогидравлические рулевые машины с насосами переменной производительности, которая изменялась посредством исполнительного электродвигателя. На всех этих судах сигнал от авторулевого подавался на якорную обмотку исполнительного двигателя.
Теплоход типа «Андижан» был оборудован секторной электрической рулевой машиной. Исполнительный двигатель постоянного тока мощностью 8 квт питался от преобразователя системы генератор - двигатель. Сигнал от авторулевого подавался на обмотку возбуждения генератора системы ГД.
При установке авторулевого АБР-1 штатная электрическая система управления рулевой машиной полностью сохранялась. Переключение с авторулевого на ручную систему производилось практически мгновенно с пульта управления авторулевого из рулевой рубки.
В декабре 1960 г. на теплоходе «Эстония» был установлен и успешно испытан авторулевой АБР-1. Это говорило о возможности его применения на всей серии указанных судов.
В 1961 году коллектив ЦПКБ-1 разрабатывал исполнительную электромеханическую приставку к авторулевому АБР-1 для электрогидравлических рулевых машин с гидравлической системой управления. Её можно было устанавливать на судах типа «Обь», «Ангара» и др.
Посредством исполнительного устройства, состоящего из электродвигателя типа МИ-32, редуктора и электромагнитной муфты было осуществлено воздействие на рычаг управления гидравлической системы рулевой машины. Сигнал от авторулевого поступал на электродвигатель, а подключение этого устройства обеспечивало электромагнитная муфта при включении авторулевого.
В 1961 году производилась широкая модернизация рулевых машин с целью возможного подключения к ним авторулевого. При этом пульт управления авторулевого служил для автоматического и ручного управления, и других штурвальных колонок в рулевой рубке устанавливать не требовалось. Такие авторулевые имелись на судах судах «Пекин», «Ленинский Комсомол», «Павлик Виноградов».
По заданию ЦПКБ-1 модернизировалась электрогидравлическая рулевая машина типа РЭГ-13 для танкера грузоподъемностью 1500 т, в которой гидравлическая система, управления заменилась электрической. Исполнительным устройством авторулевого стал комбинированный привод типа ПК, состоящий из двух электродвигателей типа АДП, которые через соответствующую механическую передачу воздействовали на элементы управления насосами переменной производительности. Пульт автоматического и ручного управления устанавливался в рулевой рубке, пульт только ручного управления - на верхнем мостике.
Выполнялись также работы, связанные с модернизацией секторной рулевой машины типа РЭР-3/2 для пассажирского теплохода на 110 человек и РЭГ-7 для лесовоза грузоподъемностью 3000 т. В рулевой машине РЭР-3/2 преобразователь по системе генератор - двигатель был заменён электромашинным усилителем типа ЭМУ-50, предназначенным для питания исполнительного двигателя рулевой машины. Обмотка управления электромашинного усилителя питалась от пульта управления авторулевого. Для дистанционного управления рулевой машиной оборудовались два поста: один - для автоматического и ручного управления в рулевой рубке и второй - для ручного управления на верхнем мостике.
В машине РЭГ-7 управление насосами переменной производительности обеспечивались исполнительным электродвигателем типа МИ-32, питающимся от электромашинного усилителя типа ЭМУ-12А. Исполнительные двигатели и электромашинные усилители поставлялись комплектно с авторулевым АР-1.
Проводимая широкая модернизация рулевых машин с целью их сочленения с бесконтактными автоматическими рулевыми позволяет в настоящее время подобрать для многих типов судов авторулевой из освоенных промышленностью образцов н только в некоторых случаях, возможно, потребуется производить специальные разработки промежуточных элементов для воздействия существующими авторулевыми на систему управления рулевых машин. Эта работа была начата коллективом ЦПКБ-1 и продолжалась в содружестве с ЦНИИМФ и промышленностью.
Внедрение авторулевых на малых судах, находящихся в эксплуатации, обеспечивался путем установки универсального авторулевого, воздействующего непосредственно на штурвал. Такой авторулевой был разработан ЦНИИМФ.
В 1961 г шла подготовка к изготовлению опытной партии. Монтаж этого авторулевого весьма прост, не требует прокладки транзитных кабелей и может быть установлен в период эксплуатации судна в очень короткое время.
Рулевое устройство современных судов является достаточно точным, технически надежным и чувствительным. Рулевое устройство рассматривается как одно из наиболее важных устройств и систем управления судном, оказывающее непосредственное влияние на обеспечение безопасности плавания судна. Система управления судном подробно описана далее.
Поэтому современное рулевое устройство строится по принципу «структурной избыточности» (дублирования) систем: если один из элементов рулевого устройства выходит из строя, то обычно хватает нескольких секунд (или десятков секунд) для того, чтобы перейти на альтернативное устройство управления рулем (при условии, что экипаж достаточно натренирован).
Поскольку рулевое устройство играет такую важную роль в обеспечении безопасности плавания судна, поскольку от него так много зависит, а судовые экипажи полагаются на него в такой большой степени, – огромное внимание уделяется вопросам создания эффективных и надежных конструкций рулевого устройства, правильности его монтажа и установки, грамотной технической эксплуатации и эффективному обслуживанию рулевого устройства, своевременному выполнению необходимых проверок, обеспечению должной натренированности экипажей (в первую очередь – судоводителей, электромехаников, матросов) в переходе с одного режима управления рулем на другой.
Основные требования к конструкции, установке и эксплуатации рулевого устройства на судне определены в следующих документах:
- «СОЛАС-74» – правила, касающиеся технических требований к рулевому устройству;
- «СОЛАС-74», Правило V/24, – «Использование системы управления курсом и/или системы управления судном по заданной траектории»;
- «СОЛАС-74», Правило V/25, – «Работа главного источника электрической энергии и/или рулевого привода»;
- «СОЛАС-74», Правило V/26, – «Рулевой привод: испытания и учения»;
- Правила Классификационных обществ, касающиеся рулевых устройств;
- Рекомендации по эксплуатационным требованиям к системам управления курсом (Резолюция MSC.64(67), Приложение 3, и Резолюция MSC.74(69), Приложение 2);
- «Bridge Procedures Guide», пп. 3.4.2, 4.3.1-4.3.3, Annex A7;
- Устав службы на судах Министерства морского флота Союза ССР;
- “РШС-89”;
- Документы и «Руководства» по «СУБ» конкретной судоходной компании;
- Дополнительные требования «Прибрежных Государств» (см., например требования США в статье Специфика требований прибрежного государства “Дополнительные требования прибрежных государств”).
В соответствии с Правилом V/26(3.1), на ходовом мостике и в румпельном отделении судна должны быть постоянно вывешены простые инструкции по эксплуатации рулевого привода с блок-схемой, показывающей порядок переключения систем дистанционного управления рулевым приводом и силовых агрегатов рулевого привода.
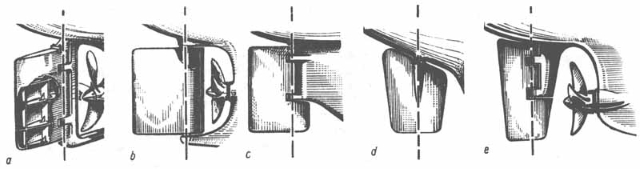
Рулевое устройство:
а — обыкновенный руль; b — балансирный руль; с — полубалансирный руль (полуподвесной); d — балансирный руль (подвесной); е — полубалансирный руль (полуподвесной)
«Международная палата судоходства» (ICS) разработала «Руководство по рутинным проверкам рулевого устройства», которое позднее в полном объеме вошло в Правило V/26 «СОЛАС-74»:
- Дистанционное ручное управление рулем – должно быть опробовано всякий раз после продолжительного управления авторулевым и перед входом в районы, где судовождение требует особой осторожности;
- Дублирующие силовые устройства управления рулем: в районах, где судовождение требует особой осторожности, следует использовать более одного силового устройства управления рулем, если возможна одновременная работа нескольких таких устройств;
- Перед отходом из порта – в пределах 12 часов до отхода – выполнить проверки и опробовать рулевое устройство, включая, насколько это применимо, проверку работы следующих узлов и систем:
— полную перекладку руля с борта на борт и ее соответствие требуемым характеристикам рулевого устройства;
ВПКМ должен в полном объеме выполнять требования по эксплуатации рулевого устройства и авторулевого, содержащиеся в нормативных и организационно-распорядительных документах.
Авторулевой должен использоваться только тогда, когда это безопасно и целесообразно.
ВПКМ контролирует правильность удержания судна на курсе авторулевым. Установка отсчет курса на авторулевом и поправки к нему выполняется в соответствии с инструкцией по эксплуатации авторулевого с обязательным участием ВПКМ, т. к. рулевой, самостоятельно устанавливая отсчет, следит за тем, чтобы рыскание судна было симметричным, и невольно вводит собственную поправку в заданный курс.
Сигнализация об отклонении судна от заданного курса, где она имеется, должна быть всегда включена, когда судно управляется авторулевым, и должна быть отрегулирована в соответствии с преобладающими погодными условиями.
Если сигнализация перестает использоваться, капитан должен быть немедленно поставлен в известность.
Использование сигнализации никоим образом не освобождает ВПКМ от обязанности часто контролировать точность удержания авторулевым заданного курса.
Предлагается к прочтению: САРП
Широкое распространение авторулевых может означать, что рулевые стали менее опытными, чем в прошлом, поэтому надежный авторулевой может обеспечить более точное удержание судна на курсе, в том числе – и в стесненных водах.
Несмотря на сказанное выше, вахтенный ПКМ всегда должен иметь в виду необходимость поставить человека на руль и заблаговременно перейти с автоматического управления рулем на ручное с тем, чтобы безопасным образом разрешить любую потенциально опасную ситуацию.
Если судно управляется авторулевым, то в высшей степени опасно позволить ситуации дойти до такой стадии, когда ВПКМ будет вынужден прервать непрерывное наблюдение, чтобы предпринять необходимые чрезвычайные действия без помощи рулевого.
Вахтенный ПКМ обязан:
- Четко знать порядок перехода с автоматического управления рулем на ручное, а также на запасное и аварийное рулевое управление (все варианты перехода с одного способа управления рулем на другой должны быть ясно изображены на мостике);
- Не менее одного раза за вахту осуществлять переход с автоматического управления рулем на ручное и обратно (переход всегда должен осуществляться либо самим вахтенным ПКМ, либо под его непосредственным контролем);
- Во всех случаях опасного сближения с судами заблаговременно переходить на ручное управление рулем;
- Плавание в стесненных водах, СРД, при ограниченной видимости, в штормовых условиях, во льдах и других сложных условиях осуществлять, как правило, при ручном управлении рулем (в необходимых случаях включать в работу второй насос гидравлического привода рулевой машины).
В соответствии с Правилом V/24 «СОЛАС-74», в районах высокой интенсивности, в условиях ограниченной видимости и во всех других опасных для плавания ситуациях, если используются системы управления курсом и/или по заданному пути, должна быть предусмотрена возможность немедленного перехода на ручное управление рулем.
В вышеупомянутых обстоятельствах вахтенный помощник капитана должен иметь возможность без промедления использовать для управления судном квалифицированного рулевого, который в любой момент должен быть готов приступить к управлению рулем.
Переход с автоматического управления рулем на ручное, и наоборот, должен производиться ответственным лицом командного состава или под его наблюдением.
Ручное управление рулем должно испытываться после каждого продолжительного использования систем управления курсом и/или по заданному пути, и перед входом в районы, где судовождение требует особой осторожности.
В районах, где судовождение требует особой осторожности, на судах должно работать более одного силового агрегата рулевого привода, если такие агрегаты могут работать одновременно.
Обязанности ВПКМ в отношении обеспечения безопасного и эффективного управления курсом судна, контроля за действиями рулевого детально определены в статье Рулевое устройство “Управление судном в ограниченной видимости”.
Вахтенный помощник капитана должен отдавать отчет в том, что внезапный выход авторулевого из строя может повлечь риск столкновения с другим судном, посадки судна на мель (при плавании вблизи навигационных опасностей) либо другие неблагоприятные последствия. По этой же причине обеспечение технической надежности и грамотной эксплуатации авторулевых становится объектом все более пристального внимания.
Ситуация: Внезапный разворот лайнера «Norwegian Sky» у входа в пролив Хуан-де-Фука
19 мая 2001 года пассажирский лайнер «Norwegian Sky» (длина 258 м, водоизмещение 6 000 тонн) следовал в канадский порт Ванкувер, имея на борту 2 000 пассажиров. При входе в пролив Juan de Fuka судно на высокой скорости внезапно пошло на циркуляцию. Неожиданные динамические нагрузки в сочетании с креном судна до 8° привели к ранениям и травмам 78 пассажиров.
Рулевые устройства буксиров и толкачей-буксиров разнообразны. Эти устройства характеризуются типом рулевого органа и его приводом.
В качестве рулевого органа широко используют:
- а) рули пластинчатые на буксирах малой мощности и обтекаемые — на буксирах средней и большой мощности;
- б) поворотные направляющие насадки гребных винтов, оборудованные стабилизаторами: одним по оси насадки или двумя разнесенными по оси насадки так, чтобы было обеспечено снятие гребного винта на плаву.
Поворотные насадки нашли широкое применение на буксирных судах Морские буксирные суда, классификация и виды внутреннего плавания, а также на портовых и морских буксирных судах. Результаты эксплуатации показали, что движительно-рулевой комплекс этого типа способствует повышению маневренных качеств при различных скоростях переднего и заднего хода, а по гидродинамическим качествам превосходит все другие движительно-рулевые комплексы, применяемые на судах отечественной и зарубежной постройки.
Использование поворотных насадок с раздельным управлением еще более эффективно, вследствие чего они рекомендуются к широкому применению на буксирах, толкачах-буксирах и толкачах. Поворотные насадки хорошо работают в битом льду, что подтверждено практикой эксплуатации двухвальных толкачей-буксиров типа ОТ-800, Плевна и др. Применение для судов, работающих в битом льду, стационарных насадок гребных винтов нецелесообразно, так как они забиваются льдом.
С целью более надежной эксплуатации морских буксиров в ледовых условиях стали применять конструктивные меры защиты насадок от попадания льда и других посторонних предметов. Перед неподвижными (стационарными) насадками, для отвода от них льда устанавливают балки обтекаемой формы. Эти балки закрепляют в корпусе судна и на входной кромке насадки. С кормы устанавливают крестообразные наделки, защищающие гребной винт и насадку во время заднего хода.
На одновальных судах при наличии кронштейна гребного вала поворотные насадки имеют нижнюю опору в пятке, закрепленную в лыжине, соединенной с кронштейном. Это позволяет повысить эксплуатационную надежность рулевого устройства.
Широкое применение в США получила схема, включающая рули переднего и заднего хода. Первые расположены за гребными винтами или за стационарными насадками, от одного до двух за каждым винтом. Рули заднего хода Маневренные характеристики судна находятся перед гребными винтами. Общее количество рулей переднего и заднего хода на толкаче с трехвальной энергетической установкой достигает 12.
Вопросы проектирования поворотных насадок (рис. 1) освещены в литературе. В табл. 1 приведены основные характеристики поворотных насадок морских буксиров и толкачей-буксиров внутреннего плавания.
Речной Регистр в своих Правилах установил минимальные толщины обшивки поворотных насадок. Однако практически для судов внутреннего плавания толщину обшивки насадки принимают на 2—3 мм больше табличных значений, установленных Речным Регистром.

Рис. 1. Поворотная направляющая насадка со стабилизатором
Внутренняя обшивка толще наружной на 1—2 мм. Это надбавка на эрозию металла. В целях повышения срока службы насадки, в районе расположения гребного винта во внутреннюю обшивку вваривают утолщенное кольцо, размеры которого регламентированы Регистром, или делают внутреннюю часть насадки литой на 0,6—0,7 ее длины.
| Табл. 1 Основные характеристики поворотных насадок, установленных на буксирах и толкачах-буксирах | ||||||||
|---|---|---|---|---|---|---|---|---|
| Тип судна | Мощность, л. с. | Частота вращения гребного винта об/мин | Коэффициент раствора насадки, ан | Коэффициент расширения насадки вн | Внутренний диаметр насадки D, мм | Длина насадки L, мм | Относительная длина насадки L/D | Длина насадки со стабилизатором L, мм |
| Морской буксир | 850 | 162 | 1,080 | 1,2 | 3 020 | 1 800 | 0,60 | Стабилизатора нет |
| 2х600 | 300 | 1,30 | 1,18 | 1 920 | 2 340 | 0,70 | 1 490 | |
| 2х600 | 300 | 1,38 | 1,16 | 1 820 | 1 100 | 0,60 | Стабилизатора нет | |
| 2х250 | 400 | 1,30 | 1,15 | 1 216 | 970 | 0,80 | То же | |
| Озерный толкач >> толкач-буксир | 2х2000 | 175 | 1,35 | 1,12 | 2 930 | 2 320 | 0,82 | 4 360 |
| 2х1000 | 375 | 1,30 | 1,12 | 1 650 | 1 300 | 0,79 | 2 110 | |
| Озерный толкач | 2х600 | 300 | 1,35 | 1,12 | 1 900 | 1 520 | 0,80 | 2 215 |
| 2х670 | 350 | 1,35 | 1,12 | 1 900 | 1 520 | 0,80 | 2 215 | |
| 2х400 | 275 | 1,35 | 1,12 | 1 700 | 1 360 | 0,80 | 1 760 | |
| Шлюзовый толкач-буксир | 2х300 | 150 | 1,32 | 1,12 | 1 670 | 1 500 | 0,90 | 2 050 |
| Речной толкач-буксир | 2х225 | 440 | 1,30 | 1,10 | 1 120 | 990 | 0,88 | 1 340 |
| 2х150 | 450 | 1,30 | 1,10 | 920 | 900 | 0,98 | 1 235 | |
| Продолжение табл. 1 Основные характеристики поворотных насадок, установленных на буксирах и толкачах-буксирах | ||||||||
|---|---|---|---|---|---|---|---|---|
| Тип судна | Отстояние передней кромки насадки от оси баллера, мм | Толщина обшивки насадки, мм | Толщина и ширина внутреннего кольца, мм | Нижняя опора | Стабилизатор насадки и его размеры, мм | Масса насадки в сборе, кг | ||
| наружной | внутренней | диаметр штыря, мм | высота штыря, мм | |||||
| Морской буксир | 540 | 8 | 8 | 8 | 240 | 240 | Нет | 4 760 |
| 520 | 6 | 6 | 6 | Нижней опоры нет | Нижней опоры нет | Есть | 2 260 | |
| 440 | 10 | 10 | 10 | Нет | 1 590 | |||
| 390 | 8 | 8 | 8 | >> | 80 | |||
| Озерный толкач >> толкач-буксир | 820 | 10 | 10 | 20х400 | Есть | 10 530 | ||
| 475 | 10 | 10 | 25х300 | 1000х2500 | 2 426 | |||
| Озерный толкач | 670 | 8 | 8 | 20х250 | 1000х1860 | 2 550 | ||
| 670 | 8 | 8 | 20х250 | 1000х1860 | 2 550 | |||
| 610 | 6 | 6 | 16х200 | 650х1700 | 4 000 | |||
| Шлюзовый толкач-буксир | 670 | 7 | 7 | 15х300 | 700х1670 | 3 900 | ||
| Речной толкач-буксир | 420 | 5 | 5 | 10х200 | 500х1100 | 674 | ||
| 430 | 4 | 4 | 10х180 | 450х820 | 804 | |||
Соединение подвесной поворотной насадки с баллером производится с помощью конуса баллера, резьбы его хвостовика и ступицы насадки.
Поворотные насадки, имеющие нижнюю опору (пятку), могут соединяться с баллером при помощи конуса или горизонтального фланцевого соединения, которое для плавания в битом льду должно быть защищено кожухом.
У судов с поворотными насадками, предназначенных для плавания в битом льду, диаметр баллера во всех случаях должен определяться расчетом; скорость заднего хода рекомендуется принимать равной 0,7—0,75 скорости переднего хода в битом льду.
Рули могут быть не балансирными у одновальных судов и балансирными у двухвальных. Конструкция и расчет рулей описаны в литературе.
В качестве рулевых приводов на буксирах и толкачах используют ручной, электрогидравлический и электрический приводы. Рулевое устройство Рулевое устройство и авторулевой буксирного судна должно иметь два привода: основной и запасной. Основной рулевой привод может быть ручным в комплексе со штуртросной или валиковой проводкой либо гидравлическим.
На вновь строящихся судах с электрической станцией ограниченной мощности целесообразно применять ручной гидравлический привод. В качестве рулевых машин могут быть рекомендованы стандартные рулевые машины с качающимися цилиндрами, обеспечивающие в случае ручного привода крутящий момент 0,16; 0,25; 0,40 тс-м при перекладке руля (насадки) от 35° с одного борта до 30° на другой борт за время, не превышающее 28 с; количество оборотов штурвала при перекладке руля на указанный угол не должно превышать 25.
Наряду с указанными рулевыми машинами получают применение гидравлические рулевые машины с ручным приводом насоса и плунжерно-реечным приводом баллера.
На буксирных судах морских и внутреннего плавания, имеющих электростанцию Судовые электростанции на буксирных судах достаточной мощности, применяют плунжерные одно или двухрулевые электрогидравлические машины, обеспечивающие момент на баллере руля (насадки):
- однорулевые — 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10,0; 16,0 тс-м;
- двухрулевые — 0,63; 1,0; 1,6; 2,5; 4,0; 6,3; 10,0 тс-м.
Для синхронной и раздельной перекладки насадок в рулевом устройстве буксиров, толкачей и толкачей-буксиров целесообразно устанавливать две электрогидравлические однорулевые машины с дистанционным управлением из ходовой рубки. Кроме того, могут быть рекомендованы рулевые гидравлические машины с качающимися цилиндрами, имеющие приводной насос и запасной ручной привод. Их рекомендуется устанавливать на судах с нереверсивными главными двигателями. Машины этого типа изготовляют нескольких типоразмеров. Крутящий момент на их баллере составляет 0,16; 0,25; 0,40; 0,63; 1,0 и 1,6 тс-м.
В речном флоте применяют рулевые гидравлические машины с приводным насосом и плунжерно-реечным приводом баллера, обеспечивающие крутящий момент на баллере 0,25; 0,63; 1,6 и 4,0 тс-м.
Кроме основного и запасного рулевых приводов на морских судах предусматривают аварийный привод, если основной и запасной приводы находятся в помещении, полностью или частично расположенном ниже самой высокой грузовой ватерлинии. На буксирных судах такое положение весьма редко. В качестве аварийного привода используют румпель-тали, если валовая вместимость самоходного судна не превышает 500 рег. т. Однако в комплексе с электрогидравлическими рулевыми машинами румпель-тали не допускаются.
На вновь строящихся буксирах и толкачах рекомендуются рулевые комплексы:
- на судах мощностью до 300 л. с.— рули или поворотные направляющие насадки в комплексе с ручной гидравлической рулевой машиной (основной привод) и румпелем, насаженным на квадрат баллера;
- на судах мощностью от 300 л. с. и более — рули балансирные или поворотные направляющие насадки в комплексе с электрогидравлическими плунжерными рулевыми машинами (основной привод).
При двух рулевых электрогидравлических плунжерных машинах (каждая обслуживает свой рулевой орган) или одной плунжерной электрогидравлической рулевой машине с двумя насосными агрегатами, приводы которых питаются от разных источников энергии, запасной рулевой привод не требуется.
Площадь пера руля, его элементы, а также элементы поворотных насадок выбирают по расчету или по прототипу. Для буксирных судов площадь руля ориентировочно может быть принята по формуле:
Σ F p = L T A м 2 , Ф о р м . 1
- где L и Т — длина и осадка судна;
- А — коэффициент:
- для океанских, морских, рейдовых буксиров и судов внутреннего плавания он соответственно равен 35—40; 20—25; 18—20 и 18.
Выбирая площадь руля, необходимо учитывать, что буксирные суда должны обладать повышенной маневренностью и управляемостью. Поэтому площадь их руля или боковая сила, создаваемая иным рулевым органом, должны обеспечивать на переднем и заднем ходу диаметр циркуляции буксира или толкача-буксира с составом, равный 3,0 L для морских буксиров и 2,0 L для рейдовых буксиров, буксиров внутреннего плавания и толкачей-буксиров. Угловая скорость циркуляции (поворота) морских и рейдовых буксиров на переднем и заднем ходу должна быть не менее 180 град/мин.
На буксирных судах, предназначенных для работы в тропиках, целесообразнее применять электрические секторные рулевые машины, требующие меньшего наблюдения и ухода по сравнению с электрогидравлическими. В работе электрогидравлических рулевых машин особое требование предъявляется к чистоте рабочей жидкости (масла) и ее температуре, которая не должна превышать 50°. Эти рулевые машины сложнее по конструкции. За ними, особенно за гидравлической системой, необходим повседневный квалифицированный уход. В эксплуатации при недостаточной фильтрации масла происходит нарушение работы распределителей насосов. Несмотря на указанное, этот тип рулевых машин является основным типом на вновь строящихся судах.
![]()
Авторулевой - навигационный прибор для автоматического управления судна рулевым приводом и удержания судна на заданном курсе. Представляет собой основную часть системы автоматического регулирования курса судна.
Содержание
Общие характеристики авторулевых [ ]
Все суда морского транспортного флота в настоящее время оборудуются системами автоматического управления (САУ) курсом судна. Основным элементом САУ является прибор управления (авторулевой).
При правильной настройке авторулевой обеспечивает снижение потерь ходового времени до 3 % за счёт более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля. Углы перекладки руля при автоматическом управлении на 20 - 30 % меньше, чем при ручном.
В 80-х годах появился новый тип авторулевого - адаптивный, имеющий автоматическую настройку параметров схемы при изменении внешних условий плавания или скорости судна. Это обеспечивает оптимальный режим работы системы без участия человека-оператора.
Адаптивные авторулевые используются главным образом на крупнотоннажных судах для улучшения их управляемости, особенно при движении с малой скоростью, на мелководье и в стеснённых условиях плавания.Требования [ ]
В соответствии с международными требованиями системы автоматического управления курсом должна обеспечивать:
- переход с ручного управления на автоматическое и наоборот, с помощью не более чем двух органов управления за время не более 3с при любом положении пера руля.
- переход с автоматического на ручное управление при любых неисправностях в системе автоматического управления;
- фильтрацию сигналов управления для уменьшения числа кладок руля от рысканья при волнении;
- при переходе с ручного управления на автоматическое авторулевой должен автоматически вывести судно на заданный курс.
В соответствии с требованиями Конвенции “Солас - 74” необходимо не более чем за 12 ч до отхода судна в рейс производить проверку работы как основных, так и аварийных каналов управления рулём. При этом должны быть проверены основной и вспомогательный рулевые приводы, система дистанционного управления рулевым приводом, посты управления рулём на ходовом мостике, аварийное энергопитание, указатели положения руля, аварийная сигнализация, работа автоматических ограничителей угла перекладки руля, а также работа средств связи мостика с румпельным отделением.
Необходимо по меньшей мере раза 3 в мес. проводить учения по аварийному управлению рулём, включая непосредственное управление из румпельного отделения по командам с ходового мостика.
В особо опасных в навигационном отношении районах каналы управления рулём левого и правого бортов должны работать одновременно.Устройство авторулевых [ ]
![]()
САУ курсом судна состоит из прибора управления (ПУ), который обычно называется авторулевым, рулевого привода (РП) с управляющим органом — рулем, судна как объекта регулирования (ОР), а также внутренней (OC1) и внешней (ОС3) обратных связей (рис. 5.18).
Прибор управления системы представляет собой вычислительное устройство, построенное на электромеханических и электронных элементах и вырабатывающее сигналы управления, пропорциональные по величине углу и угловой скорости отклонения судна от заданного курса. В отечественных авторулевых, кроме того, имеется интегрирующее устройство, вырабатывающее сигнал, устраняющий снос судна при несимметричном рыскании.
На пульте управления авторулевого размещаются все необходимые органы настройки, контроля и управления системы.
На большинстве современных судов в качестве рулевого привода используются электрогидравлические рулевые машины, обеспечивающие перекладку руля со скоростью примерно 2,5—3 град/сек.
При одновременном включении насосов левого и правого бортов скорость перекладки руля увеличивается до 5 град/сек, что- положительно влияет на управляемость судна, особенно на малом ходу.
Внутренняя обратная связь в системе осуществляется с помощью устройства, механически связанного с баллером руля и вырабатывающего электрический сигнал, пропорциональный углу поворота руля.
Внешняя обратная связь обеспечивается гирокомпасом, который преобразует изменение курса судна в угол поворота сельсина-датчика курса, связанного с сельсином-приемником в авторулевом.
Все существующие системы автоматического управления курсом судна, независимо от конструкции отдельных звеньев, работают по принципу отклонения, т. е. в авторулевом непрерывно сравниваются фактическое и заданное значения курса и вырабатывается сигнал управления. Под действием этого сигнала рулевой привод перекладывает руль и возвращает судно к заданному курсу. Сигнал внутренней отрицательной обратной связи останавливает перекладку руля, а затем возвращает руль в среднее положение. Сигнал, пропорциональный скорости поворота судна, повышает чувствительность авторулевого при отклонении судна от заданного курса и обеспечивает сдерживание при возвращении на заданный курс.
Системы автоматического управления курсом удерживают судно на прямом заданном курсе в любую погоду при скорости хода более 5 узлов, а также позволяют изменять заданный курс при введении градусной поправки.
При правильной настройке авторулевой позволяет экономить до 3% ходового времени за счет более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля; углы перекладки руля при автоматическом управлении на 20—30% меньше, чем при ручном.
Современные авторулевые обеспечивают:
Автоматическое ведение судна по заданному курсу в течение морских переходов любой продолжительности при любой погоде (авторулевой не рассчитан на работу при движении судна на заднем ходу); управление рулевым приводом в зависимости от угла и скорости ухода судна с курса; автоматическое устранение сноса судна, вызванного несимметричным рысканием под действием ветра, волнения и других причин (кроме АРМ-2); изменение курса судна при автоматическом управлении на любую величину; управление рулевым приводом вручную, пользуясь штурвалом следящего управления (кроме АРМ-2); изменение курса судна при помощи выносных постов управления в случае внезапного появления опасности (в некоторых комплектациях АБР и АР).Эксплуатация авторулевых [ ]
Качества работы системы автоматического управления курсом зависит прежде всего от динамических свойств управляемости судна как объекта регулирования, от состояния погоды и выбора параметров настройки авторулевого. Поэтому однотипные авторулевые, установленные на разнотипных судах, будут, как правило, работать по-разному. Этим з основном и объясняется тот факт, что до настоящего времени не существует каких-либо единых таблиц или графиков, позволяющих определять оптимальные значения параметров настройки авторулевого на судне при изменении условий эксплуатации. Исследования и опыт эксплуатации показали, что настройку авторулевого следует менять в случае:
изменения загрузки судна (порожнем, в балласте, с полным грузом); изменения скорости хода (полный, средний, малый ход); изменения погоды.
При этом необходимо руководствоваться следующими общими положениями:
подбирать параметры настройки авторулевого так, чтобы судно удерживалось на заданном курсе при минимальных углах перекладки руля;
не следует стремиться уменьшать величину рыскания судна на волнении :.путем повышения чувствительности авторулевого, так как при этом резко возрастает количество перекладок руля;
при большом количестве перекладок руля (более 400 в ч) точность удержания судна на курсе не повышается. Это приводит лишь к ускоренному износу рулевого устройства и потере полезной мощности силовой установки судна.
Для настройки авторулевых АБР, АР и АТР в процессе эксплуатации предусмотрена регулировка трех параметров, которыми обеспечивается стабильное качество работы системы при изменении условий плавания судна. Одним из регулируемых параметров является коэффициент обратной связи КОС.
Выбор величины КОС для каждого конкретного судна производится во время приемосдаточных испытаний авторулевого. Для судов морского транспортного флота, как показал опыт эксплуатации, величина КОС устанавливается в пределах от 0,2 до 0,8. При увеличении загрузки судна КОС следует уменьшать.
Вторым регулируемым параметром является коэффициент сигнала тахогенератора K ТГ определяющий крутизну его характеристики. Для повышения чувствительности авторулевого в тихую, погоду K ТГ следует увеличивать, поворачивая рукоятку «СИГНАЛ ТАХОГЕНЕРАТОРА» в сторону «Больше». При этом точность удержания судна на курсе повышается.
При ветре и волнении моря Kтг следует уменьшать, чтобы не перегружать рулевую машину. Если при введении градусной поправки в режиме «Автомат» судно медленно выходит на новый заданный курс, сигнал тахогенератора следует уменьшить. При этом переход судном линии, нового заданного значения курса не должен превышать более чем на 10% величину градусной поправки.
При необходимости изменить курс судна на угол более 30° в режиме «Автомат» следует медленно поворачивать штурвал следящего управления так, чтобы угол рассогласования между неподвижным индексом и курсовой чертой не превышал 10—15°.
Регулятор «ГРУБО — ТОЧНО» меняет коэффициент усиления всей системы. Рукоятку регулятора устанавливают в положение «Грубо» при свежей погоде, когда уменьшение чувствительности регулятором тахогенератора оказывается недостаточным.
Нормальная работа авторулевого обеспечивается при. отклонении напряжения судовой сети не более чем на ±10% и частоты на ±5% от номинальных значений.
Производить какие-либо изменения в монтажной схеме любого авторулевого, а также разбирать его на судне с целью изучения нельзя, так как это нарушает заводскую настройку прибора.
При обнаружении заводских дефектов, а также при выходе авторулевого из строя, необходимо произвести осмотр, составить акт и, придя в порт, вызвать представителя базовой электрорадионавигационной камеры.Все суда морского транспортного флота в настоящее время оборудуются системами автоматического управления (САУ) курсом судна. Основным элементом САУ является прибор управления (авторулевой).
При правильной настройке авторулевой обеспечивает снижение потерь ходового времени до 3 % за счёт более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля. Углы перекладки руля при автоматическом управлении на 20 - 30 % меньше, чем при ручном.
В 80-х годах появился новый тип авторулевого - адаптивный, имеющий автоматическую настройку параметров схемы при изменении внешних условий плавания или скорости судна. Это обеспечивает оптимальный режим работы системы без участия человека-оператора.
Адаптивные авторулевые используются главным образом на крупнотоннажных судах для улучшения их управляемости, особенно при движении с малой скоростью, на мелководье и в стеснённых условиях плавания.
В настоящее время большинство транспортных судов оборудовано обычными бесконтактными авторулевыми отечественного производства типа АБР, АР, АТР и “Аист“, а также иностранного АЕГ (ФРГ), РФТ (ГДР), “Аркас” (Дания), “Декка” (Великобритания) и др.
В соответствии с международными требованиями системы автоматического управления курсом должна обеспечивать:
переход с ручного управления на автоматическое и наоборот, с помощью не более чем двух органов управления за время не более 3с при любом положении пера руля.
переход с автоматического на ручное управление при любых неисправностях в системе автоматического управления;
фильтрацию сигналов управления для уменьшения числа кладок руля от рысканья при волнении;
При переходе с ручного управления на автоматическое авторулевой должен автоматически вывести судно на заданный курс.
В соответствии с требованиями Конвенции “Солас - 74” необходимо не более чем за 12 ч до отхода судна в рейс производить проверку работы как основных, так и аварийных каналов управления рулём. При этом должны быть проверены основной и вспомогательный рулевые приводы, система дистанционного управления рулевым приводом, посты управления рулём на ходовом мостике, аварийное энергопитание, указатели положения руля, аварийная сигнализация, работа автоматических ограничителей угла перекладки руля, а также работа средств связи мостика с румпельным отделением.
Необходимо по меньшей мере раза 3 в мес. проводить учения по аварийному управлению рулём, включая непосредственное управление из румпельного отделения по командам с ходового мостика.
В особо опасных в навигационном отношении районах каналы управления рулём левого и правого бортов должны работать одновременно.
САУ курсом судна состоит из прибора управления (ПУ), который обычно называется авторулевым, рулевого привода (РП) с управляющим органом — рулем, судна как объекта регулирования (ОР), а также внутренней (OC1) и внешней (ОС3) обратных связей (рис. 5.18).
![]()
Прибор управления системы представляет собой вычислительное устройство, построенное на электромеханических и электронных элементах и вырабатывающее сигналы управления, пропорциональные по величине углу и угловой скорости отклонения судна от заданного курса. В отечественных авторулевых, кроме того, имеется интегрирующее устройство, вырабатывающее сигнал, устраняющий снос судна при несимметричном рыскании.
На пульте управления авторулевого размещаются все необходимые органы настройки, контроля и управления системы.
На большинстве современных судов в качестве рулевого привода используются электрогидравлические рулевые машины, обеспечивающие перекладку руля со скоростью примерно 2,5—3 град/сек.
При одновременном включении насосов левого и правого бортов скорость перекладки руля увеличивается до 5 град/сек, что- положительно влияет на управляемость судна, особенно на малом ходу.
Внутренняя обратная связь в системе осуществляется с помощью устройства, механически связанного с баллером руля и вырабатывающего электрический сигнал, пропорциональный углу поворота руля.
Внешняя обратная связь обеспечивается гирокомпасом, который преобразует изменение курса судна в угол поворота сельсина-датчика курса, связанного с сельсином-приемником в авторулевом.
Все существующие системы автоматического управления курсом судна, независимо от конструкции отдельных звеньев, работают по принципу отклонения, т. е. в авторулевом непрерывно сравниваются фактическое и заданное значения курса и вырабатывается сигнал управления. Под действием этого сигнала рулевой привод перекладывает руль и возвращает судно к заданному курсу. Сигнал внутренней отрицательной обратной связи останавливает перекладку руля, а затем возвращает руль в среднее положение. Сигнал, пропорциональный скорости поворота судна, повышает чувствительность авторулевого при отклонении судна от заданного курса и обеспечивает сдерживание при возвращении на заданный курс.
Системы автоматического управления курсом удерживают судно на прямом заданном курсе в любую погоду при скорости хода более 5 узлов, а также позволяют изменять заданный курс при введении градусной поправки.
При правильной настройке авторулевой позволяет экономить до 3% ходового времени за счет более точного удержания судна на заданном курсе и уменьшения тормозящего действия корпуса и руля; углы перекладки руля при автоматическом управлении на 20—30% меньше, чем при ручном.
Современные авторулевые обеспечивают:
Автоматическое ведение судна по заданному курсу в течение морских переходов любой продолжительности при любой погоде (авторулевой не рассчитан на работу при движении судна на заднем ходу); управление рулевым приводом в зависимости от угла и скорости ухода судна с курса; автоматическое устранение сноса судна, вызванного несимметричным рысканием под действием ветра, волнения и других причин (кроме АРМ-2); изменение курса судна при автоматическом управлении на любую величину; управление рулевым приводом вручную, пользуясь штурвалом следящего управления (кроме АРМ-2); изменение курса судна при помощи выносных постов управления в случае внезапного появления опасности (в некоторых комплектациях АБР и АР).
Качества работы системы автоматического управления курсом зависит прежде всего от динамических свойств управляемости судна как объекта регулирования, от состояния погоды и выбора параметров настройки авторулевого. Поэтому однотипные авторулевые, установленные на разнотипных судах, будут, как правило, работать по-разному. Этим з основном и объясняется тот факт, что до настоящего времени не существует каких-либо единых таблиц или графиков, позволяющих определять оптимальные значения параметров настройки авторулевого на судне при изменении условий эксплуатации. Исследования и опыт эксплуатации показали, что настройку авторулевого следует менять в случае:
изменения загрузки судна (порожнем, в балласте, с полным грузом); изменения скорости хода (полный, средний, малый ход); изменения погоды.
При этом необходимо руководствоваться следующими общими положениями:
подбирать параметры настройки авторулевого так, чтобы судно удерживалось на заданном курсе при минимальных углах перекладки руля;
не следует стремиться уменьшать величину рыскания судна на волнении :.путем повышения чувствительности авторулевого, так как при этом резко возрастает количество перекладок руля;
при большом количестве перекладок руля (более 400 в ч) точность удержания судна на курсе не повышается. Это приводит лишь к ускоренному износу рулевого устройства и потере полезной мощности силовой установки судна.
Обслуживание систем ДАУ
Устройства, обеспечивающие реверсирование, пуск, изменение частоты вращения коленчатого вала и остановку дизеля, образуют систему управления. Органы управления, приводящие в действие систему, а также основные приборы текущего контроля работы дизелей, средства связи и сигнализации, объединяют в одном конструктивном узле, называемом постом управления. Их подразделяют на местные, дистанционные и центральные. Местные посты управления (МПУ) монтируют непосредственно на двигателе. Дистанционные посты (ДПУ) размещают в рубке совместно с постом управления судном. С центральных постов (ЦПУ) управляют работой всех главных и вспомогательных дизелей. Монтируют ЦПУ в машинном помещении на некотором расстоянии от двигателей, поэтому их относят также и к дистанционным.
Системы управления в соответствии с типами постов также подразделяют на местные и дистанционные. В настоящее время на судах речного флота получили широкое распространение дистанционные системы неавтоматизированного (ДУ) и автоматизированного (ДАУ) управления.
Все операции по выводу дизеля на заданный режим работы в неавтоматизированных системах ДУ выполняет обслуживающий персонал в определенной последовательности. Перестановка органов управления для производства последующей операции возможна в этом случае только после завершения предыдущей, что представляет значительные трудности для судоводителя, обязанного к тому же еще и управлять судном. Поэтому в последние годы системой ДУ оборудуют только суда мощностью менее 220 кВт. На судах большей мощности устанавливают систему ДАУ, которая в отличие от системы ДУ обеспечивает изменение режимов работы дизеля в соответствии с заданной командой независимо от последовательности и скорости перемещения органов управления. Так, например, для изменения режима работы дизеля с «Полного вперед» на «Полный назад» достаточно переместить орган управления (маховик или рукоятку) в положение «Полный назад», и дизель автоматически остановится, произойдет реверсирование и пуск его сжатым воздухом, а ТНВД подаст такое количество топлива в цилиндры, при сгорании которого коленчатый вал дизеля будет иметь заданную частоту вращения.
Таким образом, при ДУ обслуживающий персонал производит все операции по управлению раздельно и сам контролирует их выполнение, при ДАУ одним движением рукоятки (маховика) персонал задает программу операций, выполняемую автоматически в нужной последовательности и в заданном объеме. Для удобства управления судами шириной более 10 м системы ДАУ оборудуют бортовыми постами на крыльях мостика, работающими синхронно с основным постом в рулевой рубке. В соответствии с требованиями Речного Регистра РСФСР надежность систем ДУ и ДАУ должна обеспечивать их работу без настройки и регулирования не менее 3000 ч (одной навигации), а ресурс между ремонтами должен быть не менее 15 000 ч (пяти навигаций).
Схемы систем ДУ. На судах речного флота установлено большое число различных систем ДУ и ДАУ, различающихся объемом автоматизации и используемыми в них элементами. В общем виде система ДУ состоит из поста управления в рулевой рубке, дистанционной связи с местным постом и «встроенных» в дизель главного пускового клапана, распределительного вала, воздухораспределителя, пусковых клапанов, средств включения (выключения) реверс - редукторов (реверсивно-разобщительных муфт), контролирующих, сигнализирующих и других устройств.
По типу дистанционных связей (цепей) неавтоматизированные системы управления подразделяют на механические, электрические, пневматические, гидравлические и комбинированные. Наибольшее распространение на речных судах получили механические и гидравлические системы ДУ. В качестве механических дистанционных связей чаще всего используют канатные (тросиковые), рычажно - валиковые и смешанные механические цепи. При канатной связи валики постов управления соединяют со звездочками (шкивами). При повороте рукоятки поста управления (их может быть в рулевой рубке и несколько) через шарнирные цепи (канаты) заданную команду воспринимает валик МПУ. Силу натяжения канатов регулируют с помощью талрепов, представляющих собой стержни с правой и левой внутренней резьбой. При повороте таких стержней в разные стороны происходит подтягивание или ослабление канатов.
В рычажно - валиковых системах ДУ связь постов управления осуществляется с помощью рычагов и валиков, а в смешанных системах — с помощью рычагов, валиков и канатов (цепей).
Основные научные достижения Средневековья: Ситуация в средневековой науке стала меняться к лучшему с.
Автор статьи

Читайте также:


