
В чем заключается суть метода относительного движения судов
Обновлено: 28.04.2024
Задачи расчета маневра безопасного расхождения с судами-целями проще и надежнее решать в режиме относительного движения.
Определяющее значение для оценки опасности столкновения судов имеет четкое знание судоводителем закономерностей, указанного выше, относительного движения. Для того чтобы произвести оценку ситуации, определить опасность столкновения и решить задачу необходимо четко знать закономерности перемещения судов в режиме относительного движения. Для их понимания нет необходимости производить какие-либо вычисления, а надо только знать факторы, от которых зависит изменения обстановки при маневрировании собственного и других судов.
Характер изменения относительного движения зависит от трех факторов:
1) от расположения других судов относительно курса собственного судна (справа или слева);
2) величины курсового угла между линией относительного движения и ДП своего судна (курсового угла ЛОД 90° впереди траверза, на траверзе, позади траверза).
3) расположением ЛОД относительно собственного суда (пересекает курс по носу, проходит через нас или пересекает линию курса по корме).
Изменение относительного движения характеризуют двумя параметрами:
— направлением ОЛОД относительно первоначальной ЛОД (по часовой стрелке или против часовой стрелки (вправо или влево));
— изменением расположения ОЛОД по отношению к собственному судну (удаляется от нас или приближается к нам).
Основным элементомвекторного треугольника скоростей является вектор относительного движения V0, направление и величина которого характеризует динамику развития ситуации расхождения. Поэтому четкому пониманию ситуации служит систематизированная схема перемещений отметок объектов.
По характеру перемещений отметок по ЛОД их делят на три вида:
1) эхо-сигнал перемещается параллельно курсовой черте нашего судна;
2) эхо-сигнал пересекает линию нашего курса;
3) эхо-сигнал не перемещается по экрану, пеленг и дистанция до него не изменяется, следа послесвечения нет. Такое судно называют «сателлит».
При перемещении эхо-сигнала параллельно курсовой черте нашего судна различают четыре основных случая образований ЛОД (см. рисунок):
Случай 1. Суда следуют встречными курсами (причем может быть больше, меньше или равно ):
Случай 2. Наше судно обгоняетсудно-цель:
Случай 3. Судно-цель обгоняет наше судно:
Случай 4. Судно-цель неподвижно, относительная скорость ее равна скорости нашего судна, а вектор направлен от носа к корме
Примечание:
При перемещении эхо-сигналов целей параллельно курсовой черте существуют следующие закономерности:
— эхо-сигнал неподвижного объекта всегда перемещается параллельно линии курса собственного судна при любых его измерениях;
— при изменениях скорости собственного или других судов параллельность перемещения эхо-сигналов курсовой черте сохраняется.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.009)
При двустороннем маневрировании скорости изменения дистанции, бокового перемещения и пеленга между кораблями определяются параметрами движения обоих кораблей. Рассуждая аналогично случаю одностороннего маневрирования, получим следующие формулы для решения задач двустороннего маневрирования (рис. 4.4):
где ОВИР - общая величина изменения расстояния; ОБП - общая величина боксового перемещения; ВИП - величина изменения пеленга.
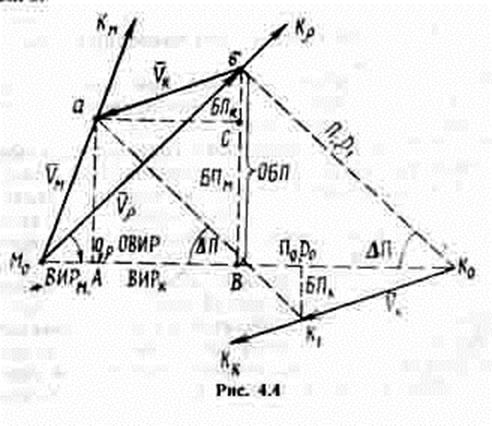
Тогда элементы позиции маневрирующего корабля при двустороннем маневрировании по истечении времени маневра можно представить в виде:
Итак, метод решения задач, базирующийся на применении основных элементов маневрирования, сводится к вычислениям по формулам (4.16) - (4.21).
Так как, пользуясь основными элементами маневрирования, в выражениях разложения расстояния и пеленга в ряд Тейлора
мы учитываем члены только первого порядка, тем самым допуская ошибку, которая численно будет равна остаточному члену ряда. При решении задач маневрирования по формулам (4.19) и (4.21) ошибки будут тем большими, чем больше t. В практике маневрирования допустимо решать задачи по формулам (4.19), (4.21) для промежутков времени маневрирования, равных нескольким минутам. Особенно значительными могут быть ошибки при быстром изменении пеленга, то есть при больших значениях ВИП. Для быстроты решения задач маневрирования с применением ВИР, БП и ВИП пользуются табл. 31а, МТ-75.
Элементы маневрирования можно выразить через относительное движение. Из рис. 4.4 следует:
4.5 Задачи тактического маневрирования
При применении оружия, а также при совместном плавании в ордерах кораблю приходится маневрировать для занятия, удержания или изменения позиции.
В быстро меняющейся обстановке современного морского боя может возникнуть необходимость в кратчайший срок изменить дистанцию, с максимальной скоростью изменить пеленг на противника или, наоборот, сохранить его, изменив дистанцию, и т. д. В каждом конкретном случае необходимо правильно выбрать прием маневрирования.
Для расчета элементов маневра применяются аналитический, табличный, приборный и графический способы.
Аналитический способ заключается в определении искомых величин по формулам. Этот способ чаще применяется при исследовательских разработках, теоретических расчетах и при составлении таблиц. Для решения задач в практике маневрирования способ широкого применения не получил, так как не дает возможности решить задачу достаточно быстро и не обладает наглядностью.
Табличный способ, когда искомые величины находят по таблицам, применяется только при решении некоторых типов задач маневрирования, универсальных таблиц для решения всех задач маневрирования пока не существует. Кроме того, этот способ не обладает достаточными точностью и наглядностью, поэтому широкого распространения на кораблях для решения задач маневрирования не получил.
Широкое применение вычислительной техники, позволяющей быстро и точно определить элементы маневрирования, способствовало тому, что приборный способ стал основным для решения задач маневрирования.
Графический способ решения задач маневрирования прост и удобен. В отличие от других способов он нагляден и позволяет легко проконтролировать все решения. Этот способ обеспечивает достаточные для практических целей быстроту и точность, является наиболее универсальным и автономным. Выполнение расчетов маневрирования графически обязательно даже в том случае, когда решение задачи обеспечивается другими способами. Это дублирование вызывается требованиями живучести управления.
Графическое решение задач маневрирования может выполняться на навигационной карте, на листе бумаги или на маневренном планшете. Маневренный планшет (см. рис. 4.7) представляет собой совмещенные азимутальную и стадиметрическую сетки. Началом координат является совмещенный центр обеих сеток.
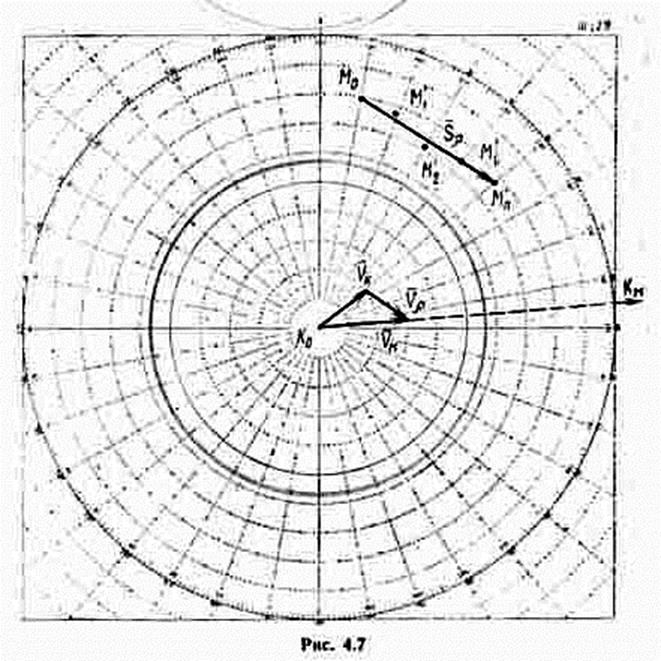
Азимутальная сетка образована рядом радиальных прямых, проведенных из центра планшета через каждые 10°. Стадиметрическая сетка служит масштабной шкалой. Она образована рядом концентрических окружностей, проведенных на одинаковом удалении одна от другой. На внешней окружности стадиметрической сетки нанесены две шкалы градусных делений от 0 до 360°.
Наружная шкала обозначает направления от центра планшета относительно линии 0-180, принятой за меридиан. Внутренняя шкала отличается от внешней на 180, поэтому она используется при нанесении (снятии) обратных пеленгов.
За единицу масштаба на маневренном планшете принимается одно большое деление - расстояние между соседними концентрическими оцифрованными окружностями. Для построения треугольника скоростей это деление принимается равным 1 каб/мин. Масштаб расстояний выбирается в зависимости от дистанции до объекта маневра и тенденции ее изменения. В практике тактического маневрирования наиболее часто одно большое деление планшета соответствует 10 каб.
4.6 Предвычисление (прогнозирование) элементов относительных позиций
Зная элементы движения кораблей и их начальное взаимное положение, можно, построив треугольник скоростей, из позиции М0 провести относительный курс Кr (рис. 4.5), определить (прогнозировать) взаимное положение кораблей на любой момент времени. Типовыми задачами такого рода являются:
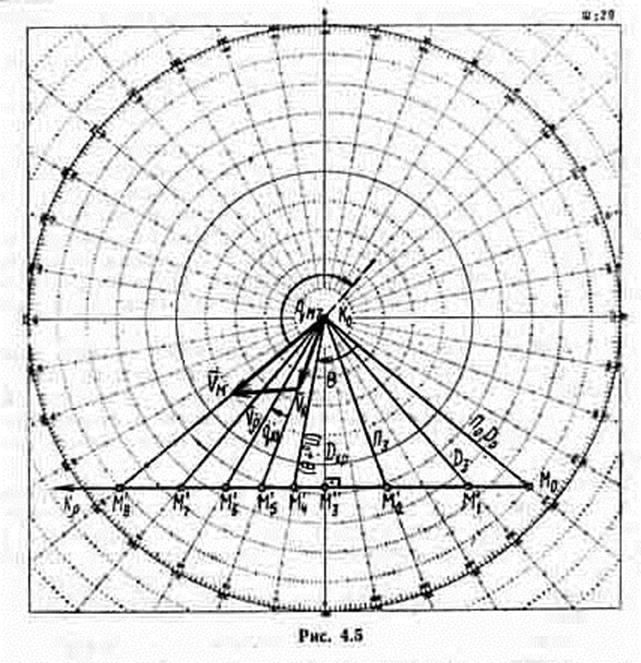
1. Расчет позиции маневрирующего корабля, когда расстояние до объекта маневра равно заданной величине D3.
Для решения задачи нужно раствором циркуля, равным в принятом масштабе заданной дистанции, из точки К0 сделать засечку на линии относительного движения Кr. Полученная точка М '1 соответствует заданному положению между кораблями.
2. Расчет позиции, когда пеленг на объект маневра равен заданному значению П3.
Проведя из точки К0 линию заданного пеленга, получим точку пересечения ее с линией относительного курса Кr, в которой находится позиция М '2 соответствующая поставленному условию.
3. Определение момента, когда расстояние между кораблями кратчайшее Dкр.
Угол qр между вектором П0D0 и вектором Sr называется относительным курсовым углом.
Угол М '1К0М0 есть приращение пеленга за время маневра. Он равен разности пеленгов П1 - П0 и обозначается буквой q.
Треугольник позиций дает геометрическую картину маневра в относительном движении, т. е. показывает перемещение маневрирующего корабля относительно объекта маневра.
Треугольник М0М1М '1, сторонами которого являются векторы перемещения маневрирующих кораблей Sм, Sк, Sr, называется треугольником перемещений. Он служит для перехода от относительного движения к абсолютному и показывает взаимосвязь абсолютных перемещений Sм и Sк маневрирующих кораблей и относительного перемещения Sr. Треугольник перемещений строится при начальной позиции маневрирующего корабля приемом обратного построения, то есть решается уравнение Sr = Sм - Sк.
Для определения абсолютной позиции маневрирующего корабля в конце маневра, то есть для перехода от относительного движения к абсолютному, необходимо из начальной позиции маневрирующего корабля М0 провести линию его курса Kм, а из относительной позиции М '1 - линию курса объекта маневра Кк. В точке пересечения линий этих курсов н будет позиция маневрирующего корабля к моменту окончания маневра (точка М1).
Если построить треугольник перемещений за время маневрирования, равное единице, получим треугольник М0аb со сторонами VM, VK, Vr, который называется треугольником скоростей.
Треугольник скоростей определяет взаимосвязь курсов кораблей К и М с курсом и скоростью относительного движения.
Существуют два приема построения треугольников скоростей: прямой и обратный.
При прямом построении векторы Vм и Vк прокладываются из одной точки, а вектор относительной скорости Vr соединяет конец вектора Vк с концом вектора Vм, то есть при таком построении графически решается уравнение Vм = Vк + Vr. Таким приемом построен треугольник К0а' b'.
Обратное построение отличается от прямого тем, что концы векторов Vм и Vк сходятся в одной точке, а вектор относительной скорости Vr соединяет начала обоих векторов, то есть решается уравнение Vr = Vм - -Vк. Таким приемом построен треугольник М0аb.
Способ построения треугольника скоростей зависит от известных в условии задачи элементов, составляющих треугольник.
Треугольники скоростей, перемещений н позиций связаны между собой:
- треугольник перемещений и треугольник позиций имеют общую сторону Sr;
- треугольник скоростей и треугольник перемещений подобны, поэтому Sм / Vм = Sк / Vк = Sr / Vr = t. Значит, время маневра можно найти через элементы абсолютного, переносного и относительного движения;
- общим элементом для всех трех треугольников маневрирования является относительный курс Кr.
Одновременное рассмотрение треугольников маневрирования дает возможность наглядно представить весь маневр как в относительном, так и в абсолютном движении.
4.4 Основные элементы маневрирования
Кроме точного решения задач маневрирования с помощью векторных треугольников используется метод с применением основных элементов маневрирования - величин, характеризующих скорость изменения пеленга и дистанции.
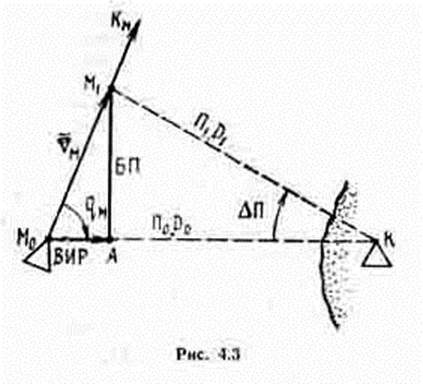
Пусть корабль маневрирует из начальной позиции М0 (рис. 4.3) постоянными курсом и скорость относительно объекта К. Скорость изменения дистанции и пеленга можно определить как первые производные этих величин по времени:
VD = dD / dt; (4.5)
wп = dП / dt, (4.6)
Из выражений (4.5) и (4.6) можно определить элементарные приращения дистанции и пеленга:
dD = VDdt; (4.7)
Разложив вектор скорости корабля Vм на составляющие, направленные по линии начального пеленга и перпендикулярно к нему, получим мгновенные скорости изменения расстояния VD и пеленга wп:
Знак VD определяется величиной курсового угла. При курсовых углах от 0 до 90° VD имеет отрицательный знак (дистанция уменьшается), при курсовых углах от 90 до 180° - положительный (дистанция увеличивается).
Угловая скорость изменения пеленга определяется поперечной составляющей вектора скорости Vм и расстоянием D между маневрирующим кораблем и объектом маневра:
VБП = D dП / dt. (4.10)
Поперечная составляющая называется мгновенной скоростью бокового перемещения корабля. Из рис. 4.3 следует, что
Тогда, учитывая (4.10), получим
wп = dП / dt = VБП / D = Vм sin qм / D. (4.12)
Знаки wп и VБП совпадают. Они определяются знаком приращения пеленга при его изменении. При маневрировании относительно объекта маневра правым бортом приращение пеленга положительно, левым - отрицательно.
Значения первых производных дистанции и пеленга по времени называют величиной изменения расстояния (ВИР) и величиной изменения пеленга (ВИП), а вспомогательную величину VБП - боковым перемещением (БП).
Итак, если величины ВИР и БП выражаются в тех же единицах, что и скорости кораблей, то для их вычисления пользуются формулами:
Выражая ВИП в градусах в минуту, можно записать:
ВИП = 57,3 БП / D. (4.15)
Величины ВИР и БП выражаются в кабельтовых в минуту, ВИП - в градусах в минуту. Если же в формулах (4.13) и (4.14) скорость хода берется в узлах, эти формулы примут вид:
В формулах (4.9) - (4.12) курсовой угол qм и мгновенные скорости изменения дистанции, бокового перемещения и пеленга непрерывно изменяются. Поэтому для отыскания по ним точных значений изменения пеленга и дистанции, необходимо было бы интегрировать правые части выражений (4.7) и (4.8) по дистанции и курсовому углу (пеленгу), а левые - по времени:
В практике тактического маневрирования элементы позиций D1, П1 по истечении времени вычисляют по формулам, вытекающим из (4.17) и (4.18):

Содержанием дисциплины "Тактическое маневрирование" является изучение относительного перемещения маневрирующих кораблей для занятия выгодного положения относительно объекта маневра.
Из двух маневрирующих кораблей объектом маневра принято считать тот из них, относительно которого определяются последующие положения другого корабля. Объект маневра обозначается буквой К.
Корабль, положение которого определяется либо изменяется относительно объекта маневра, называется маневрирующим и обозначается буквой М.
Знание взаимного положения маневрирующих кораблей на любой момент времени позволяет правильно оценить обстановку, осуществить обоснованное, рассчитанное маневрирование при применении оружия или уклонении от встречи с противником, рационально выполнить маневрирование при совместном плавании, обеспечить безопасное расхождение и т. д.
Маневрирование корабля относительно неподвижного объекта маневра называется односторонним, а относительно движущегося объекта маневра -двусторонним. Если взаимосвязанное маневрирование осуществляют три корабля и более, такое маневрирование называется многосторонним.
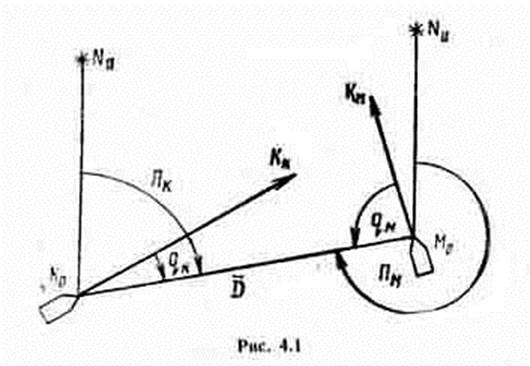
Маневрирование всегда направлено на изменение или сохранение относительного расположения маневрирующих кораблей. Положение маневрирующего корабля М0 относительно объекта маневра К0 в полярной системе координат определяется вектором D (рис. 4.1), начало которого совпадает с точкой К0, а конец - с точкой М0 (при рассмотрении вопросов маневрирования кораблей ограниченный район земного геоида, на котором происходит маневрирование кораблей, допустимо принимать за плоскость, а корабли считать точечными объектами). Точка М радиуса-вектора D называется позицией маневрирующего корабля. Направление и длину вектора D называют элементами позиции маневрирующего корабля. Направление вектора D относительно меридиана точки К есть не что иное, как пеленг П на маневрирующий корабль, а длина вектора D - расстояние между кораблями М и К. Нередко направление вектора D определяется относительно диаметральной плоскости объекта маневра, то есть его курсовым углом qк.
Таким образом, к элементам позиции маневрирующего корабля относятся: пеленг на маневрирующий корабль П или курсовой угол qк и дистанция D. Так как при маневрировании используются только истинные пеленги и курсы, они обозначаются П, К, а не ИП, ИК, как в навигации.
Основными методами, применяемыми для изучения закономерностей, свойственных изменению элементов позиции маневрирующего корабля в ходе маневра, а также при практическом решении задач маневрирования, являются:
- метод относительного движения;
- метод, основанный на использовании основных элементов маневрирования.
4.2 Метод относительного движения
При двустороннем маневрировании установление законов изменения элементов позиции затруднено вследствие одновременного перемещения маневрирующих кораблей. Поэтому в тактическом маневрировании применяют метод относительного движения. Метод относительного движения заключается в замене двустороннего маневрирования как бы односторонним, при котором движение маневрирующего корабля рассматривается относительно условно неподвижного объекта маневра.
Относительным движением называется движение тела по отношению к подвижной системе координат. Движение самой подвижной системы координат относительно неподвижной системы координат называется переносным, а движение тела относительно системы координат, условно принятой за неподвижную, называется абсолютным движением.
Абсолютное, переносное и относительное движение связаны между собой геометрическим соотношением
При двустороннем маневрировании за начало подвижной системы координат принимается объект маневра. Тогда его собственное движение по отношению к поверхности Земли будет переносным, движение маневрирующего корабля по отношению к поверхности Земли будет абсолютным, а по отношению к объекту маневра - относительным.
Для дальнейших рассуждений введем следующие обозначения:
М, Км, Vм, Sм, qм - соответственно позиция, курс, скорость, перемещение, курсовой угол маневрирующего корабля в абсолютном движении;
М', Кr, Vr, Sr, qr - те же элементы в относительном движении;
К, Kк, Vк, Sк, qк - позиция, курс, скорость, перемещение, курсовой угол объекта маневра;
П, D, t, Т - соответственно истинный пеленг, дистанция, промежуток времени, момент по часам.
С учетом принятых обозначений формула (4.1) будет иметь вид:
Так как перемещения кораблей пропорциональны скоростям, можно записать:
Таким образом, чтобы перейти к относительному движению, необходимо из абсолютного движения исключить переносное.
Пусть корабли М и К, находящиеся в начальный момент в точках М0 и К0 (рис. 4.2), следуют соответствующими курсами Kм и Kк и скоростями Vм и Vк.
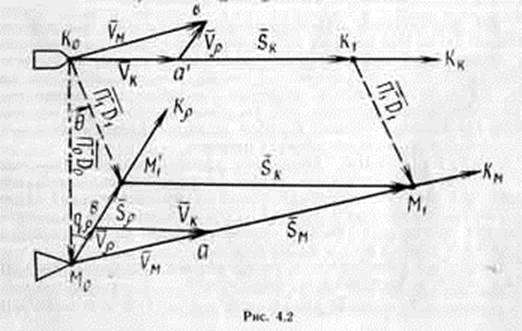
Начальная позиция маневрирующего корабля определяется пеленгом П0 и дистанцией D0.
Через некоторый промежуток времени t корабль М, пройдя расстояние Sм = Vмt переместится в точку М1 а корабль К - в точку К1, пройдя расстояние Sк = Vкt при этом новая позиция М1 маневрирующего корабля будет определяться вектором П1D1, то есть пеленгом П1 и дистанцией D1.
Чтобы определить относительную позицию М'1 на момент времени Т1 = Т0 + t, надо, как это следует из формулы (4.4), из вектора Sм геометрически вычесть вектор Sк, тогда вектор M0M '1 будет вектором относительного перемещения Sr, а М '1 - относительной позицией маневрирующего корабля на момент времени T1 и взаимное расположение кораблей для точки М1 будет точно таким же, как и для точки М '1, так как векторы K1M1 и K0M '1 равны и параллельны. Это вытекает из того, что К0К1М1М '1 - параллелограмм (по построению).
Если нанести фактические места маневрирующих кораблей на некоторые моменты времени T2, Т3 . Тn, то аналогично можно найти соответствующие относительные позиции маневрирующего корабля (М '2, М '3, . M 'n), которые лежат на так называемой линии относительного движения (ЛОД). Это та линия, по которой перемещается маневрирующий корабль относительно объекта маневра. Направление линии относительного перемещения, отсчитанное от истинного меридиана, называется относительным курсом, который обозначается символом Kr.
Таким образом, изучение закономерностей изменения элементов позиции маневрирующего корабля М относительно объекта маневра К как следствия перемещения кораблей М и К относительно поверхности Земли со скоростями Vм и Vк можно заменить изучением закономерностей изменения элементов позиции корабля М как следствия его перемещения относительно корабля К с относительной скоростью Mr. В этом и состоит сущность метода относительного движения.
Решение задач тактического маневрирования этим методом сводится к решению векторных уравнений (4.2), (4.3), (4.4) путем построения треугольников позиций, скоростей и перемещений.
4.3 Треугольники маневрирования, их характеристика и приемы решения
Треугольник К0М0М '1 (рис. 4.2), вершинами которого являются позиции М0, K0, М '1 маневрирующих кораблей в начале и конце маневра, а сторонами векторы начальной и конечной позиций П0D0, П1D1 и вектор относительного перемещения маневрирующего корабля Sr, называется треугольником позиций.
В треугольнике позиций вектор Sr всегда направлен от начальной позиции маневрирующего корабля к конечной относительной позиции, то есть П1D1 = П0D0 + Sr.
Наиболее тяжелые последствия вызывают столкновение судов в море. Одним из направлений понижения аварийности на судах является совершенствование средств и методов для предупреждения столкновений судов в море. Разрабатываются и внедряются специальные автоматизированные системы.
Основой безопасности расхождения судов в море является надлежащее наблюдение, по результатам которого оценивается обстановка и если необходимо следует производить расчеты для безопасного расхождения. С этой целью ПРАВИЛО 7в (МППСС-72) рекомендует вести «. радиолокационную прокладку или равноценное систематическое наблюдение за обнаруженными объектами…».
Сейчас, насколько возможно, рассмотрим и теоретически обоснуем радиолокационную прокладку, а также и равноценное ей систематическое наблюдение.
ВЕКТОР .
ВЕКТОРОМ называется величина, определяющаяся своим численным значением и направлением в пространстве, подчиняющаяся правилу геометрического сложения.
В математике с векторами производятся все математические действия. Действия сложения и вычитания двух векторов возможно осуществить двумя независимыми способами: геометрическим и аналитическим.
В нашем случае будем рассматривать только два математических действия: сложение и вычитание на плоскости и только геометрическим способом.
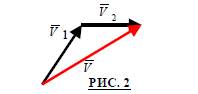
Вектор геометрически отображается стрелкой ( РИС. 1 ):
длина отрезка, изображенного стрелкой - АВ, в масштабе соответствует скорости движения;
направление стрелки указывает куда совершается движение.
В
РИС. 1 вектор скорости – как количественную, так и её направление.
Символика: V – скорость; V – вектор скорости.
Точка А – начало вектора,
точка В – конец вектора.
Одним из основных элементов в радиолокационной
прокладке является вектор скорости.
А Отличие скорости от вектора скорости в том,
что скорость выражает количественную величину,а
1.1 СЛОЖЕНИЕ ДВУХ ВЕКТОРОВ СКОРОСТЕЙ.
Геометрическая сумма – V двух скоростных векторов – V1 иV2, построеных на плоскости друг за другом. ( РИС.2 ) , выражается стрелкой соединяющей начало первого вектора скорости V1 с концом второго вектора скорости V2 .
В результате сложения векторов получаем ВЕКТОРНЫЙ СКОРОСТНОЙ ТРЕУГОЛЬНИК прямого построения, где направление вектора V всегда направлено от начала вектора V1 к концу вектора V2 .
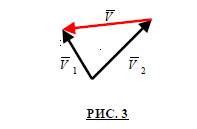
1.2 ВЫЧИТАНИЕ ВЕКТОРОВ СКОРОСТЕЙ .
Разностью двух скоростных векторов V1 и V2 является скоростной вектор V полученный от построения ВЕКТОРНОГО СКОРОСТНОГО ТРЕУГОЛЬНИКА, две стороны которого являются V1 и V2 построенных так, что их начало расположено в одной точке, а концы их соеденены с вектором V, направление которого всегда направлено в сторону уменьшаемого вектора. ( РИС. 3 ).
ОТНОСИТЕЛЬНОЕ И ИСТИННОЕ ДВИЖЕНИЕ .
Любое движение, морское или сухопутное, можно рассматривать двояко, т.е. как ОТНОСИТЕЛЬНОЕ или как ИСТИННОЕ.
ОТНОСИТЕЛЬНОЕ ДВИЖЕНИЕ, это движение, контроль за которым ведется относительно любого ПОЛЮСА, выбранного самим наблюдателем. Полюсом может быть любой ориентир на поверхности Земли, кроме географических полюсов Земли.
ИСТИННОЕ ДВИЖЕНИЕ, это движение по поверхности Земли, контроль за которым осуществляется относительно земных географических ПЛЮСОВ.( Широтой и долготой ). Безусловно, такое истинное движение не будет обсалютно истинным движением, которое может быть получено только с учетом вращения Земли, ее движением по эклиптике и т. д.
1) При использовании РЛС, в условиях ограниченной видимости, все параметры (пеленг и дистанция) измеряются с судна наблюдателя. Чтобы выяснить как, по отношению к судну наблюдателю (полюсу), будет перемещаться видимый эхо-сигнал от другого судна, необходимо выполнить прокладку и проследить за его движением , т.е. необходимо выполнить относительную прокладку.
2.1 ОТНОСИТЕЛЬНАЯ ПРОКЛАДКА.
Относительная радиолокационная прокладка получила широкое распространение в судовождении. В условиях ограниченной видимости с помощью РЛС можно качественно оценить окружающую обстановку при условии ведения радиолокационной прокладки.
Если РЛС стабилизирована по КУРСУ или по СЕВЕРУ в режиме относительного движения, то наблюдатель на экране РЛС видит только перемещение эхо-сигнала относительно своего судна, считая себя в центре развертки РЛС и своего движения не видит. Это наблюдаемое движение является ОТНОСИТЕЛЬНЫМ ДВИЖЕНИЕМ. Перенеся такое движение на маневренный планшет или лист бумаги, получим относительную радиолокационную прокладку, которая отображает взаимное расположение судов по времени и позволяет оперативно решить вопросы:
насколько опасно плавание со встречными судами, т.е. на каком кратчайшем расстоянии разойдемся с судами ( Дкр ) ;
как быстро наступит момент кратчайшего сближения нашего судна с другими (Ткр).
Суть ОТНОСИТЕЛЬНОЙ Р.Л. ПРОКЛАДКИ заключается в следующем (РИС. 4) :
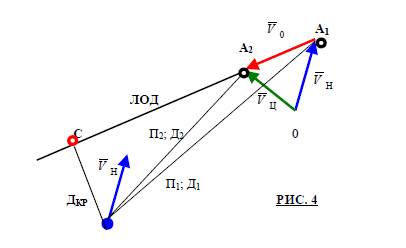
По результатам радиолокационного наблюдения необходимо, по меньшей мере, выбрать две точки А1 и через промежуток времени Т точку А2 (на практике предпочтение отдается Т = 6 мин., т.е. 1:10 часа), взять их позиции по пеленгу – П и дистанции – Д , нанесём на планшет или бумагу. Пример: Позиция точки А1 будет П1 и Д1, а точки А2 будет П 2 и Д2. Расстояние пройденное эхо-сигналом от А1 до А2 обозначим стрелкой, направленной в сторону смещения эхо-сигнала, получим вектор относительной скорости V0. за время Т . До тех пор пока сохроняется неизменным V0 , эхо-сигнал цели будет перемещаться в направлении этого вектора и со скоростью равной его длине. Зная направление и скорость движения эхо-сигнала можно проложить путь его будущего движения. Прямая линия, проведенная через точки А1 и А2 в направлении движения эхо-сигнала цели называется ЛИНИЕЙ ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ или сокращённо ЛОД .
Движущейся эхо-сигнал цели по ЛОД имеет место, где он сблизится с нашим судном на самое кратчайшее расстояние- ДКР. Перпендикуляр, опущенный из центра планшета или точки
О на листе бумаги (с расположения нашего судна) на ЛОД, есть ДКР, а пересечение этого перпендикуляра с ЛОД даст точку С при выходе эхо-сигнала в которую между нашим и наблюдаемым судами будет самое близкое расстояние.
Время, необходимое для перехода эхо-сигнала цели от первой точки наблюдения А1 до выхода в точку кратчайшего сближения С, принято называть ТКР, которое найдем:
Где: А1С – расстояние от первой точки наблюдения до точки кратчайшего сближения с целью;
V0 - относительная скорость.
Для определения элементов движения цели ( ЭДЦ), т.е. истинного курса и скорости цели, исходим из следующего: наше судно и цель имеют каждый свое истинное направление движения и истинную скорость, т.е. имеются два истинных вектора Vн и Vц . На экране РЛС мы не видим своего вектора скорости Vн , а видим вектор относительной скорости V0. А если из двух истинных векторов скоростей Vн и Vц , существующих реально, убрать вектор нашей скорости, то получим вектор относительной скорости V0 , математически будет выражаться так :
Где: Vц – неизвестный вектор, Vн – известный вектор, V0 - получено из РЛ прокладки.
Преобразуем предыдущую формулу и получим неизвестное Vц :
Для нахождения неизвестного вектора цели необходимо геометрически сложить два известных вектора, т.е. построить векторный скоростной треугольник. Из РЛ прокладки, имеем вектор относительной скорости V0 (РИС. 4), к его началу, своим концом, построим вектор нашей скорости. Суммарный третий вектор, проведенный из начала вектора нашей скорости на конец вектора относительной скорости даст вектор скорости цели Vц. Его направление это истинный курс цели, а длина, во временном масштабе, это истинная скорость цели. При построении векторного скоростного треугольника существуют три постоянные свойства:
ПЕРВОЕ свойство:Вектор нашей скорости ВСЕГДА строится таким образом, что его конец распологается в первой точке наблюдения.
ВТОРОЕ свойство:Вектор нашей скорости и вектор скорости цели ВСЕГДА начинаются в одной точке О .
ТРЕТЬЕ свойство:Вектор относительной скорости ВСЕГДА начинается на конце вектора нашей скорости и заканчивается на конце вектора скорости цели.
© 2014-2022 — Студопедия.Нет — Информационный студенческий ресурс. Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав (0.013)
Автор статьи

Читайте также: