
Способы индикации на экране рлс вспомогательной информации при решении задач расхождения судов
Обновлено: 19.04.2024
Обработка радиолокационной информации включает определенную последовательность действий:
• наблюдение и обнаружение целей;
• глазомерную оценку опасности радиолокационной ситуации сближения и отбор целей для радиолокационной прокладки;
• радиолокационную прокладку — определение элементов движения цели и параметров ситуации сближения;
• расчет маневра расхождения;
• контроль за изменением радиолокационной ситуацией во время маневра до полного расхождения судов.
Наблюдение и обнаружение целей. Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В открытом море постоянное наблюдение следует вести на шкалах среднего масштаба 8—16 миль с периодическим осмотром обстановки на шкалах как более мелкого, так и более крупного масштабов. В стесненных водах постоянное наблюдение обычно ведется на шкалах крупного масштаба с периодическим обзором обстановки на мелкомасштабных шкалах.
Глазомерная оценка радиолокационной ситуации. Глазомерная оценка является обязательным этапом обработки радиолокационной информации и позволяет при большом количестве целей отобрать для прокладки опасные и потенциально опасные цели. Глазомерная оценка производится по следу послесвечения, который остается на экране РЛС за эхо-сигналом цели и представляет собой предыдущую траекторию относительного сближения судов. Мысленным продолжением следа послесвечения за эхо-сигналом цели получается линия относительного сближения (ЛОД), по которой определяют дистанцию кратчайшего сближения Дкр.
Глазомерную оценку опасности столкновения можно использовать только тогда, когда судоводитель понимает принцип построения треугольника скоростей, т.е. имеет достаточный навык работы на маневренном планшете.
При глазомерной оценке радиолокационной ситуации для выделения потенциально опасных целей, которые становятся опасными при маневре собственного судна и цели, чрезвычайно важно четко представлять направление разворота ЛОД, которое происходит в результате этих маневров.
Все возможные схемы перемещения эхо-сигналов охватывают следующие три начальные ситуации.
1. Эхо-сигнал перемещается параллельно курсовой черте нашего судна — это может быть встречное судно, обгоняемое судно, обгоняющее судно или неподвижная цель:
• при изменении скорости одного или обоих судов параллельность перемещения эхо-сигнала сохраняется;
• при изменении курса нашего судна ЛОД разворачивается в сторону, противоположную стороне разворота;
• разворот ЛОД (следа послесвечения), если наше судно не маневрировало, указывает на изменение курса цели в сторону разворота;
• эхо-сигнал неподвижной цели всегда перемещается параллельно линии курса нашего судна.
2. Эхо-сигнал перемещается не параллельно курсовой черте:
— через начало развертки — существует опасность столкновения;
— через курсовую линию нашего судна — цель пересекает нашкурс;
— по линии, проходящей по корме нашего судна, — наше судно пересечет или уже пересекло курс цели:
• при изменении направления или скорости перемещения эхосигнала, если наше судно не маневрировало, глазомерно нельзя сделать однозначного вывода о виде маневра цели. Вид маневра можно установить только с помощью радиолокационной прокладки;
• разворот нашего судна в сторону эхо-сигнала цели приводит к развороту ЛОД от кормы к носу нашего судна;
• уменьшение скорости нашего судна приводит к развороту ЛОД от кормы к носу нашего судна;
• увеличение скорости нашего судна приводит к развороту ЛОД от носа к корме нашего судна;
• отворот нашего судна от эхо-сигнала не позволяет глазомерно оценить эффективность этого маневра (уменьшается относительная скорость сближения, увеличивается tкр и в результате может произойти резкое изменение направления ЛОД, определяемое только при радиолокационной прокладке).
3. Эхо-сигнал не перемещается — судно-сателлит:
• появление следа послесвечения параллельно курсовой черте —изменение скорости одного или обоих судов;
• изменение курсов одного или обоих судов вызывает появление следа послесвечения, не параллельного курсовой черте.
Радиолокационная прокладка. Относительная прокладка — выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике.
Главное, что интересует судоводителя при обнаружении объекта на экране радиолокатора – насколько опасна наблюдаемая цель.
Степень опасности оценивается по двум критериям:
1. Дкр – дистанция кратчайшего сближения – минимальное расстояние, на которое цель может приблизиться к нашему судну, если
никто не будет изменять элементы своего движения (курс и скорость);
2. tкр – интервал времени до точки кратчайшего сближения – интервал времени от момента получения последней точки цели, на основании которой строится линия относительного движения ЛОД, до момента приближения цели на кратчайшее расстояние к нашему судну.
Чем меньше Дкр, тем более опасной является приближающаяся цель. Но нельзя оценивать степень опасности только по дистанции
кратчайшего сближения. Не менее важными факторами являются скорость сближения и запас времени, которым располагает судоводитель, чтобы предпринять маневр и разойтись на безопасном расстоянии. Так ситуация обгона, как правило, менее опасна чем расхождение на встречных (пересекающихся) курсах, даже если Дкр в первом случае меньше, чем во втором.
Построение треугольника скоростей
Суть относительной прокладки заключается в том, что за центр системы координат мы принимаем наше судно, которое помещаем в центр планшета, а цели наносим на планшет в соответствующие точки по пеленгу и дистанции, измеренных при помощи РЛС.
Пошаговые действия для оценки ситуации:
1. в центр планшета наносится вектор скорости нашего судна, равный 6-ти минутному отрезку (например, скорость нашего судна 15 узлов, откладываем по курсу 1, 5 мили);
2. делаются замеры пеленга и дистанции встречного судна;
3. в таблицу записываются данные измерения и на планшет наносится первая точка – А1;
4. в полученную точку параллельно переносится и “втыкается” вектор скорости нашего судна;
5. через 3 минуты повторяются пункты 2-3, наносится вторая точка А2. Приближенно оценивается ситуация сближения;
6. еще через 3 минуты повторяются пункты 2-3, наносится третья точка А3;
7. соединив точки А1 – А2 – А3, получаем линию относительного движения – ЛОД;
8. из начала нашего вектора скорости строим вектор Vв, который является вектором истинной скорости и курса встречного судна;
9. перпендикуляр, проведенный из центра планшета к ЛОД определяет Дкр (в нашем случае Дкр = 1,7 мили). Величину tкр находим, откладывая по ЛОД отрезки, равные V0 до Дкр (здесь, примерно, укладывается 1,5 V0, т.е. tкр = 1,5 х 6 мин = 9 мин);
10.принимается решение по выбору маневра расхождения.

Построение треугольника скоростей
Маневр расхождения курсом
1. Необходимо на ЛОД нанести упреждающую точку У положения цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из этой точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. Вектор нашего судна Vн при помощи циркуля разворачиваем до тех пор, пока он не пересечется с ОЛОД.
5. Полученный вектор Vн2 переносим в центр планшета и определяем новый курс нашего судна, который необходим для расхождения с целью на расстоянии в 3 мили.
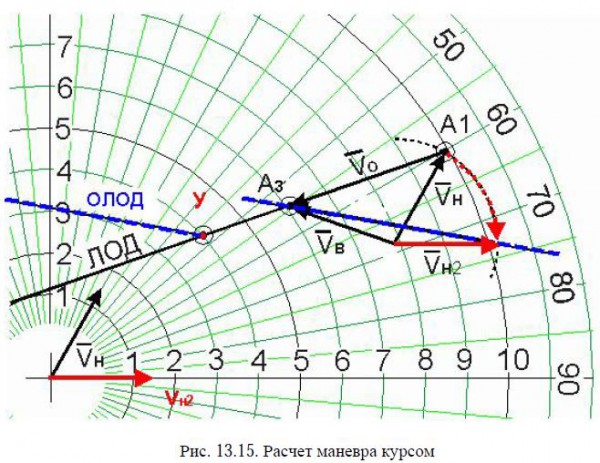
Расчет маневра курсом
Маневр расхождения скоростью
1. Необходимо на ЛОД нанести упреждающую точку У – положение цели в момент начала нашего маневра. Обычно это 3-х минутный интервал (расстояние А1 – А2).
2. Из точки У проводим касательную к окружности, величина которой соответствует заданной дистанции расхождения (здесь 3 мили).
3. Полученную прямую ожидаемой линии относительного движения ОЛОД переносим параллельно самой себе в точку А3.
4. ОЛОД «отсекает» часть вектора нашего судна. Отрезок от начала вектора до точки пересечения с ОЛОД откладываем на векторе в
центре планшета. Это и есть новая скорость нашего судна, необходимая для расхождения на заданной дистанции.
5. Снижение скорости необходимо начинать заранее – до наступления момента У, с тем, чтобы в этот момент судно уже имело новую скорость.
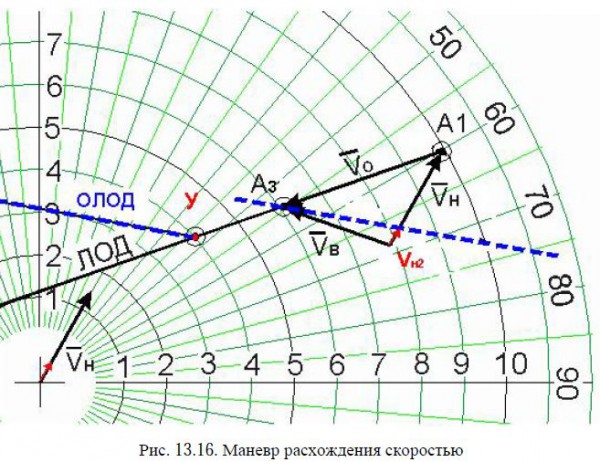
Маневр расхождения скоростью
Маневр расхождения скоростью применим для судов водоизмещением до 20000 тонн. В любом случае, при выполнении маневра расхождения необходимо учитывать маневренные характеристики судна.
При выборе маневра расхождения с опасной целью, когда на экране наблюдаются эхо-сигналы других судов, необходимо учитывать те из них, ситуация сближения с которыми может ухудшиться в результате выбранного маневра. Такие опасные суда определяются глазомерно по направлению разворота ЛОД при предполагаемом маневре. Особенность радиолокационной прокладки в этом случае заключается в необходимости одновременного ее ведения для всех потенциально опасных судов. Как правило, на планшет наносится полный анализ ситуации до момента окончания маневра и возвращения к исходным параметрам движения вашего судна.
Накладной оптический планшет.Он служит для ведения прокладки непосредственно на экране РЛС. Прокладочная поверхность (собственно планшет) представляет собой вогнутое стекло, кривизна которого одинакова с кривизной электронно-лучевой трубки РЛС. Между планшетом и трубкой на одинаковом расстоянии от прокладочной поверхности и люминофорного слоя помещено полупрозрачное зеркало. Торцовая поверхность планшета подсвечивается.
Когда кончик воскового карандаша касается планшета непосредственно над отметкой судна, то его отображение оказывается совмещенным с отметкой при наблюдении за экраном с любою положения. Таким образом, практически исключаются ошибки прокладки за счет параллакса. С помощью специального воскового карандаша на планшете могут производиться построения. При выключении подсвета планшета карандашные отметки становятся невидимыми и экран РЛС, наблюдается, как и при отсутствии прокладки. Оптические планшеты входят в комплект станций «Енисей Р», «Наяда-5» (встроенного типа), «Наяда-1 », «Печора-2» (накладные).
Устройство оценки опасности сближения судов. Представляет собой дополнительную приставку к РЛС или отдельный прибор, позволяющий получить на экране РЛС несколько вспомогательных маркеров в виде отрезков прямых линий, имеющих строго радиальное направление и являющихся опасными ЛОДами. Судоводитель имеет возможность совместить любой из, маркеров дальним его концом с отметкой интересующей его цели. Если отметка, приближаясь, движется точно по маркеру или сходит с него очень медленно, то цель опасна. По углу между траекторией движения отметки (действительным ЛОДом) и маркером оценивают кратчайшее расстояние (Dкр) и степень опасности цели. В отечественной приставке "Ольха" маркеры снабжены дужками, проходящими через ближний конец маркера перпендикулярно к нему. Размер дужки определяет допустимое Dкр. Если траектория отметки цели не пересекает дужку, цель не опасна.
Источники помех в работе РЛС, обнаружение неправильных показаний, ложных сигналов, засветки от моря и т. д. Способы подавления помех. Теневые секторы.
Обработка радиолокационной информации включает определенную последовательность действий:
• наблюдение и обнаружение целей;
• глазомерную оценку опасности радиолокационной ситуации сближения и отбор целей для радиолокационной прокладки;
• радиолокационную прокладку — определение элементов движения цели и параметров ситуации сближения;
• расчет маневра расхождения;
• контроль за изменением радиолокационной ситуацией во время маневра до полного расхождения судов.
Наблюдение и обнаружение целей. Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется постоянно. В открытом море постоянное наблюдение следует вести на шкалах среднего масштаба 8—16 миль с периодическим просмотром обстановки на шкалах как более мелкого, так и более крупного масштабов. В стесненных водах постоянное наблюдение обычно ведется на шкалах крупного масштаба с периодическим обзором обстановки на мелкомасштабных шкалах.
Глазомерная оценка радиолокационной ситуации. Глазомерная оценка является обязательным этапом обработки радиолокационной информации и позволяет при большом количестве целей отобрать для прокладки опасные и потенциально опасные цели. Глазомерная оценка производится по следу послесвечения, который остается на экране РЛС за эхо-сигналом цели и представляет собой предыдущую траекторию относительного сближения судов. Мысленным продолжением следа послесвечения за эхо-сигналом цели получается линия относительного сближения (ЛОД), по которой определяют дистанцию кратчайшего сближения Дкр.
Глазомерную оценку опасности столкновения можно использовать только тогда, когда судоводитель понимает принцип построения треугольника скоростей, т.е. имеет достаточный навык работы на маневренном планшете.
При глазомерной оценке радиолокационной ситуации для выделения потенциально опасных целей, которые становятся опасными при маневре собственного судна и цели, чрезвычайно важно четко представлять направление разворота ЛОД, которое происходит в результате этих маневров.
Все возможные схемы перемещения эхо-сигналов охватывают следующие три начальные ситуации.
1. Эхо-сигнал перемещается параллельно курсовой черте нашего судна — это может быть встречное судно, обгоняемое судно, обгоняющее судно или неподвижная цель:
• при изменении скорости одного или обоих судов параллельность перемещения эхо-сигнала сохраняется;
• при изменении курса нашего судна ЛОД разворачивается в сторону, противоположную стороне разворота;
• разворот ЛОД (следа послесвечения), если наше судно не маневрировало, указывает на изменение курса цели в сторону разворота;
• эхо-сигнал неподвижной цели всегда перемещается параллельно линии курса нашего судна.
2. Эхо-сигнал перемещается не параллельно курсовой черте:
— через начало развертки — существует опасность столкновения;
— через курсовую линию нашего судна — цель пересекает наш курс;
— по линии, проходящей по корме нашего судна, — наше судно пересечет или уже пересекло курс цели:
• при изменении направления или скорости перемещения эхосигнала, если наше судно не маневрировало, глазомерно нельзя сделать однозначного вывода о виде маневра цели. Вид маневра можно установить только с помощью радиолокационной прокладки;
• разворот нашего судна в сторону эхо-сигнала цели приводит к развороту ЛОД от кормы к носу нашего судна;
• уменьшение скорости нашего судна приводит к развороту ЛОД от кормы к носу нашего судна;
• увеличение скорости нашего судна приводит к развороту ЛОД от носа к корме нашего судна;
• отворот нашего судна от эхо-сигнала не позволяет глазомерно оценить эффективность этого маневра (уменьшается относительная скорость сближения, увеличивается tкр и в результате может произойти резкое изменение направления ЛОД, определяемое только при радиолокационной прокладке).
3. Эхо-сигнал не перемещается — судно-сателлит:
• появление следа послесвечения параллельно курсовой черте — изменение скорости одного или обоих судов;
• изменение курсов одного или обоих судов вызывает появление следа послесвечения, не параллельного курсовой черте.
Радиолокационная прокладка. Относительная прокладка — выполняется на маневренном планшете путем построения векторного треугольника скоростей. С использованием относительной прокладки легко можно определить элементы движения цели и параметры ситуации сближения. Поэтому она является основным методом, используемым на практике.
Главное, что интересует судоводителя при обнаружении объекта на экране радиолокатора - насколько опасна наблюдаемая цель.
Степень опасности оценивается по двум критериям:
1. Дкр - дистанция кратчайшего сближения - минимальное расстояние, на которое цель может приблизиться к нашему судну, если никто не будет изменять элементы своего движения (курс и скорость);
2. tкр - интервал времени до точки кратчайшего сближения - интервал времени от момента получения последней точки цели, на основании которой строится линия относительного движения ЛОД, до момента приближения цели на кратчайшее расстояние к нашему судну.
Чем меньше Дкр, тем более опасной является приближающаяся цель. Но нельзя оценивать степень опасности только по дистанции кратчайшего сближения. Не менее важными факторами являются скорость сближения и запас времени, которым располагает судоводитель, чтобы предпринять маневр и разойтись на безопасном расстоянии. Так ситуация обгона, как правило, менее опасна чем расхождение на встречных (пересекающихся) курсах, даже если Дкр в первом случае меньше, чем во втором.
Международные правила предупреждения столкновения судов в море, принятые в 1972 г. (МППСС—72), предусматривают использование радиолокации для следующих целей:
обеспечения заблаговременного обнаружения встречаемых судов и установления элементов их движения;
выбора наилучших маневров для избежания столкновения.
При этом судоводители должны учитывать характеристики, эффективность и ограничения радиолокационного оборудования; любые ограничения, накладываемые используемой шкалой дальности; влияние на радиолокационное обнаружение состояния моря и метеорологических факторов, а также других источников помех; возможность того, что малые суда могут быть не обнаружены на экране РЛС на достаточном расстоянии; количество, расположение и перемещение судов, обнаруженных РЛС.
Кроме того, РЛС необходимо использовать таким образом, чтобы получить заблаговременно предупреждение об опасности столкновения, а также обеспечить радиолокационную прокладку или равноценное систематическое наблюдение за обнаруженными объектами.
Опыт мореплавания показал, что только обнаружения другого судна на экране и визуальной оценки возможности столкновения с ним недостаточно для расхождения судов. Здесь необходимо вести наблюдения за изменением положения обнаруженного судна и прокладку его перемещения на карте, бумаге или специальном планшете.
Прокладка может быть истинной, когда элементами движения обнаруженного судна служат его истинный курс и скорость относительно земной поверхности, и относительной, когда направление движения и скорость хода наблюдаемого судна определяют относительно наблюдающего судна.
Истинная прокладка, если ее ведут на карте, показывает положение судна относительно береговых объектов и дает его координаты, что в целях безопасного расхождения судов необязательно.
Относительная прокладка представляет взаиморасположение судов и выполняется проще истинной, которую, если потребуется, можно выполнить, исходя из относительной, путем дополнительных построений.
Относительную прокладку начинают сразу по обнаружении другого судна и ведут до полного расхождения с ним. Промедление в определении элементов движения обнаруженного судна может привести к столкновению судов.
Вести прокладку следует на маневренном планшете, представляющем собой круг с сеткой полярных координат, равномерно разбитый на радиусы, показывающие направления, и концентрические окружности, показывающие расстояния по этим направлениям. Центр планшета, как и центр экрана РЛС, соответствует месту наблюдающего судна.
Допустим, что судоводитель, наблюдая по экрану за обнаруженным судном, по направлению и расстоянию до него, измеренным через равные промежутки времени At, взятые в моменты Ти Т2, Т3, наносит на планшет точки А1г А2 и А3 относительного местонахождения судна (рис. 157). Если прямая, проведенная через
| й | —AtJ: |
| 12 | |
| 10 | |
| __ 81 | |
| /Л в | |
| / 1 / flV^ - | |
| I ( lOi | s " T 1 I |
| \ \ | "Jil |
| "л// |
| № WO' 158' Рис. 157. I Определение элементов движения встречного судна. |
0°  Рис. 158. Определение маневра расхождения со встречным судном. |
эти точки, проходит вблизи центра планшета (точка О), то имеется опасность столкновения.
Прямая Лл А2 А3 называется линией относительного движения (ЛОД) встречного, т. е. наблюдаемого, судна. Расстояние ОК., на котором наблюдаемое судно должно пройти относительно наблюдающего, измеряемое по перпендикуляру к ЛОД из центра планшета, называется дистанцией кратчайшего сближения, или критическим расстоянием DKP. Отношение расстояния между отмеченными на ЛОД точками к промежутку времени между соответствующими моментами наблюдений, например AiA j к Тs—Ти представит величину относительной скорости хода V0 встречного судна.
Действительные элементы движения встречного судна определяют построением векторного треугольника скоростей (см. рис. 157). Из центра планшета проводят вектор VH скорости наблюдающего судна. Из конца этого вектора проводят параллельно ЛОД вектор V0 относительной скорости хода встречного судна. Тогда проведенный из начала вектора VH к концу вектора V0 замыкающий вектор VB выразит действительные скорость хода и курс встречного судна.
Треугольник скоростей можно строить и при точках перемещения наблюдаемого судна. Аналогично треугольнику скоростей строят в соответствующем масштабе и треугольник расстояний (путей).
Определение маневра расхож-
дения. Допустим, что в моменты Ти Т2 и Т3 встречное судно прошло через точки At, А2 и А3 (рис. 158). Так как на решение задачи требуется некоторое время, то нанесем на ЛОД так называемую упрежденную точку А4, в которую судно должно прийти к моменту Т4 начала маневра. Из центра планшета радиусом, равным расстоянию Озаю на котором решено разойтись со встречным судном, нанесем по обе стороны ЛОД дуги. Тогда прямые А4т и А4п, проведенные через точку А4 и касательные к нанесенным дугам, представят новые ЛОД. ЛОД1 относится к прохождению наблюдающего судна по корме встречного, а ЛОД2 —■ к прохождению по носу последнего.
Для определения возможных маневров расхождения построим при точках At и А4 треугольник расстояний. В нем прямая AtA4 выразит вектор S0 относительного расстояния, которое встречное судно пройдет к моменту начала маневра, т. е. за промежуток времени At = Tt—7\. Умножив скорость хода VH своего судна на величину Aполучим расстояние, пройденное судном за это же время, и проведем вектор S„ этого расстояния в направлении своего курса к началу вектора S0. Тогда проведенный из точки 04 начала вектора S„ замыкающий вектор SB выразит действительные расстояние и курс встречного судна.
Чтобы встречное судно прошло на заданном расстоянии Дзад, надо так изменить курс (либо скорость хода) своего судна, чтобы вектор VH касался новых ЛОД. Для этого радиусом, равным этому вектору, сделаем из точки Oi засечки на продолженных ЛОД1 (точка С4) и ЛОД2 (точка Bt). Проведенные к этим точкам из точки Oi прямые ОС, и OBj дадут искомые курсы расхождения. Через AKi и А/Сг обозначены соответствующие углы отворота.
Расхождение на заданном расстоянии можно выполнить и на прежнем курсе с помощью изменения скорости хода. Векторы измененной скорости хода получим в соответствующем масштабе в точках пересечения вектора .!>„ с ЛОД1 (точка В2) и с ЛОД2 (точка С2). В первом случае для этого потребуется уменьшить скорость (вектор OiB2), во втором — увеличить (вектор 0С2).
Возможен случай, когда окружность с радиусом, равным Ц,аД, не пересечется ни с одной ЛОД. Это означает, что изменением только курса разойтись с наблюдаемым судном на заданном расстоянии нельзя, т. е. потребуется изменить скорость хода своего судна.
На практике, для удобства расчетов, делать наблюдения желательно через промежутки времени, кратные трем (если допускают условия сближения), а скорости выражать числом кабельтовых в минуту.
Пример. Следуя ИК = 15° со скоростью хода V„ = 13,2 узла, обнаружили эхо-сигнал встречного судна и произвели в соответствующие моменты следующие наблюдения:
7\ = 06.30; ЯЯ1 = 54°,0; DL= 11,5 мили.
Под радиолокационной ориентировкой в судовождении понимают определение места судна на судоходном участке пути относительно берегов, оси и кромок судового хода с использованием судовой РЛС.
На внутренних водных путях применяются как штурманский, так и глазомерный методы радиолокационной ориентировки.
Штурманский метод, широко применяемый в морском судовождении, на внутренних водных путях применяется редко, лишь при плавании по водохранилищам и озерам, так как он требует ведения расчетов с помощью штурманских инструментов и навигационных карт, заставляет судоводителя отвлекаться от радиолокационного наблюдения и не позволяет быстро определить местоположение судна. Наиболее часто применяются определения места по двум расстояниям до ориентиров (Рис.1а) и по радиолокационному пеленгу до ориентира и дистанции до него (Рис.1б).

Рис.1 Штурманские методы определения места судна
Место судна находится в точке А пересечения двух линий положения. Основной недостаток данных методов – отсутствие контроля за правильностью опознавания ориентиров.
В основном радиолокационная ориентировка осуществляется глазомерным методом, то есть путем сопоставления радиолокационного изображения судоходного участка с ориентирами, нанесенными на навигационной карте (горные берега, гидротехнические сооружения, устья рек и заливов, мысы, яры и мосты, навигационные знаки и т.д.). С целью непрерывного контроля движения судна применяют типовые приемы радиолокационной ориентировки. Наиболее эффективно их использование на РЛС, работающей в режиме «По норду» или «Стабилизированный курс».
Ориентировка по носовому и кормовому ориентирам. В качестве ориентиров А и Б (Рис.2) могут быть выбраны русловые маяки, буи, мысы, знаки щелевых и линейных створов, то есть точечные ориентиры. Положение судна на линии пути определяется с помощью визира или параллельной индексной линии (PIL), которые нужно на экране РЛС развернуть так, чтобы они рассекали носовой и кормовой точечные ориентиры пополам. Если оба ориентира находятся на линии, то судно находится на намеченной линии пути. Если судно начнет отклоняться от намеченного маршрута, отметки ориентиров сместятся с линии. Для того, чтобы вернуться на намеченную линию пути, курс судна (ОК – отметка курса) изменяют в сторону ориентиров.

Навигационная карта Экран РЛС
Рис.2 Ориентировка по носовому и кормовому ориентирам
Чем меньше расстояние между ориентирами и чем крупномасштабнее шкала наблюдения – тем быстрее судоводитель замечает боковое смещение судна с намеченного маршрута.
Ориентировка на участках с установкой буев по оси фарватера. Прием может быть применен на озерных участках водохранилищ (Рис.3).

Навигационная карта Экран РЛС
Рис.3 Ориентировка при следовании по осевой трассе
В качестве ориентиров используются осевые буи. Боковое смещение судна Д от оси судового хода определяется с помощью подвижного кольца дальности и визира, направленного параллельно линии осевых буев.
Если используется параллельная индексная линия, то она наносится на экран РЛС параллельно линии осевых буев, и смещается влево относительно центра развертки на расстояние, на котором судоводитель планирует держаться от буев (Рис.4).

Рис.4 Следование по осевой трассе с использованием PIL
В этом случае контроль за положением судна осуществляется так же, как и при ориентировке по носовому и кормовому ориентирам. Нахождение отметок осевых буев на линии говорит о том, что судно следует по намеченной линии пути. При смещении отметок с линии своевременно вводится поправка в курсе на компенсацию замеченного отклонения.
Ориентировка по ходовому берегу. Применяется на свободных и зашлюзованных реках и водохранилищах как на прямолинейных, так и на криволинейных участках пути. Применение приема эффективно в тех случаях, когда судовой ход проходит вдоль ходового берега. Подвижное кольцо дальности устанавливают на оптимальное значение дистанции до берега Д (Рис.5), и во время движения стараются управлять судном так, чтобы кольцо на экране РЛС всегда касалось радиолокационного изображения берега.

Навигационная карта Экран РЛС
Рис.5 Ориентировка при следовании вдоль ходового берега
Неровности береговой черты мысленно сглаживаются. Берег может быть не только прямым, но и выпуклым, и вогнутым.
На точность радиолокационной проводки относительно берега влияют точность используемых навигационных карт, изменение уровня воды относительно принятого при составлении навигационной карты, а также качество настройки РЛС.
Ориентировка на участках с латеральной системой расстановки навигационных знаков. Типовой прием применяется на участках внутренних водных путей, где судовой ход обставлен буями правой и левой стороны. Маршрут движения рекомендуется запланировать так, чтобы он был направлен параллельно линии буев одной кромки, и по возможности делил расстояние между буями разных кромок пополам. Визир на экране РЛС (Рис.6) устанавливается параллельно линии кромочных буев, а боковое смещение определяется сравнением расстояний, на которых относительно линии визира расположены отметки буев разных кромок. Если отрезки равны между собой – судно находится на запланированной линии пути.

Навигационная карта Экран РЛС
Рис.6 Ориентировка при следовании по латеральной системе
Боковое смещение на криволинейных участках определяется с помощью сравнения положения центра развертки относительно мысленной линии, проходящей между отметками точечных ориентиров правой и левой кромок судового хода. Дублирование контроля за положением судна возможно с использованием подвижного кольца дальности, если движение выполняется вдоль ходового берега (Рис.7).

Навигационная карта Экран РЛС
Рис.7 Латеральная система, выполнение поворота
Ориентировка при следовании каналом. Ось судового хода , как правило, проходит посередине канала. Управлять судном следует так, чтобы центр развертки на экране РЛС находился посередине между отметок откосов канала.
В случае, когда откосы канала вблизи центра развертки не просматриваются, боковое смещение оценивается с помощью визира. Визир устанавливается параллельно изображению откосов, и, если расстояние от правого и левого откосов до линии визира равны , то судно следует по оси канала (Рис.8).

Рис.8 Ориентировка при следовании каналом
При несимметричном расположении откосов вводится поправка в курсе, причем ее величина должна быть незначительной, так как большие отклонения от курса могут привести к посадкам на мель или повреждению винтов и рулей.
Внимательно следует проходить уширения канала, где контроль за местоположением судна затруднен.
Предварительная проработка маршрута
Одним из важных этапов обеспечения безопасности радиолокационной проводки судна в условиях ограниченной видимости является предварительная проработка маршрута. Она заключается в следующем:
- тщательно изучается навигационная карта и лоция района плавания;
- проверяется корректура навигационной карты;
- на навигационной карте выделяют надежные радиолокационные ориентиры (мысы, ходовой берег, гидротехнические сооружения, русловые маяки и т.д.);
- намечают приемы ориентировки для каждого прямолинейного и криволинейного участка;
- выделяют особо опасные в навигационном отношении места (камни, затонувшие суда, подводные гряды);
- намечают линию движения судна относительно радиолокационных ориентиров;
- на прямолинейных участках указывают компасные курсы с учетом поправки компаса;
- по возможности и при необходимости указывают расстояние плавания на каждом компасном курсе;
- намечают точки поворотов, которые должны иметь инструментальную привязку относительно надежных радиолокационных ориентиров (траверз, курсовой угол, пеленг, дистанция); определяют угол поворота судового хода;
- намечают безопасную скорость движения судна на каждом участке пути с учетом его особенностей (соотношение габаритов пути и размеров судна, наличие и близость навигационных опасностей, просматриваемость участка, наличие маломерного флота и т.д.);
- определяют и указывают на карте радиусы поворотов;
- если на судне имеется указатель угловой скорости поворота, то определяют значение угловой скорости по формуле
где V – скорость судна в км/ч;
R – радиус поворота в км.
Предварительная проработка маршрута выполняется заранее. Судоводителям рекомендуется включать судовую РЛС в хорошую видимость, что дает возможность не только безошибочно опознавать различные эхо-сигналы, но и запомнить или отметить на навигационной карте особенности радиолокационного изображения отдельных естественных или искусственных объектов, используемых в качестве радиолокационных ориентиров. В хорошую видимость уточняются компасные курсы, контрольные значения инструментальных привязок точек поворота, значения угловой скорости поворота, углов перекладки руля и т.д.
Таким образом, в условиях хорошей видимости судоводитель приобретает навыки в чтении радиолокационной информации и подготавливается к прохождению данного участка в условиях ограниченной видимости.
| Рис.9 Пример предварительной проработки маршрута |


Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой.

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого.

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.
© cyberpedia.su 2017-2020 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!
Автор статьи

Читайте также: