
Какие электродвигатели используются на судах
Обновлено: 18.04.2024
двигатели (обеспечивающие движение судна) и вспомогательные судовые двигатели (для привода электрогенераторов, насосов, вентиляторов и т. п.). В качестве судового двигателя используют двигатели внутреннего сгорания (ДВС – СУДОВЫЕ ДИЗЕЛИ, СУДОВЫЕ ДИЗЕЛЬНЫЕ ДВИГАТЕЛИ, СУДОВЫЕ ДВИГАТЕЛИ ВНУТРЕННЕГО СГОРАНИЯ), паровые турбины, и газовые турбины. Основными характеристиками судовых двигателей являются: большой ресурс, возможность реверсирования, умеренная трудоёмкость технического обслуживания, проводимого в судовых условиях, использование топлива в основном тяжёлых сортов, отсутствие жёстких ограничений по массе и размерам двигателя.
Чаще всего на судах используются ДВС — судовые дизели, обладающие наибольшей экономичностью из всех типов судовых двигателей. На транспортных, промысловых и вспомогательных судах применяются мало-, средне- и высокооборотные дизели с наддувом. Малооборотные судовые двигатели внутреннего сгорания используются как главные двигатели судов различных типов; их агрегатная мощность составляет 2,2—35 Мвт, число цилиндров 5—12, удельный эффективный расход топлива 210—215 г/ (квт×ч), частота вращения 103—225 об / мин. Среднеоборотные судовые двигатели внутреннего сгорания используются преимущественно в качестве главных двигателей судов среднего размера; их мощность достигает 13,2 Мвт, число цилиндров 6—20, эффективный расход топлива 205—210 г/(квт×ч), частота вращения 300—500 об/мин. Высокооборотные судовые двигатели внутреннего сгорания применяются в основном как главные двигатели на малых судах, а также в качестве вспомогательных двигателей на судах всех типов; их агрегатная мощность до 2 Мвт, число цилиндров 12—16, удельный эффективный расход топлива 215—230 г/(квт×ч), частота вращения свыше 500 об/мин.
Паровые турбины по степени распространённости несколько уступают двс; используются в качестве главных двигателей на крупных танкерах, контейнеровозах, газовозах и других судах, а также на судах с ядерной энергетической установкой (см. Атомный ледокол "Ленин"). Применяются также как вспомогательные двигатели. Мощность паротурбинных установок достигает 80 Мвт, удельный эффективный расход топлива 260—300 г/(квт×ч), частота вращения турбины 3000—4000 об/мин.
Газовые турбины в составе судовых двигателей применяются в основном в качестве главных двигателей на военных кораблях, транспортных судах на подводных крыльях и на судах на воздушной подушке. Примером газовых турбин является судовой газотурбинный двигатель. Эксплуатация судовых дизелей- подготовка дизельной установки к действию, пуск дизеля, обслуживание дизеля во время работы, вывод из действия (остановка) дизеля в соответствии с инструкцией завода-изготовителя и Правилами технической эксплуатации (ПТЭ). РАЗДЕЛ "ОБОРУДОВАНИЕ"
Помимо общих требований, предъявляемых ГОСТом, судовые электродвигатели должны удовлетворять специальным требованиям, вытекающим из условий работы их на судне. К этим условиям прежде всего относится способность машин надежно работать при периодическом крене до 45°, возникающем при качке судна.

Помимо периодической качки, судовые машины должны без вреда для их работы выдерживать длительный крен и дифферент до 7°.
Изоляция машин должна выполняться из влагостойких и теплостойких изолирующих материалов.
Все судовые машины должны быть снабжены встроенными фильтрами для подавления помех радиоприему. По способу защиты от вредных влияний окружающей среды электродвигатели бывают в открытом, брызгозащищенном, водозащищенном, герметическом и взрывобезопасном исполнении.
У электродвигателя в открытом исполнении, или, короче, у открытого электродвигателя все вращающиеся и токопроводящие части открыты, т. е. не имеется каких-либо специальных защитных приспособлений.
Представление об открытом электродвигателе дает рис. 1, на котором изображена открытая машина типа МП-550. Такие машины обычно устанавливаются с козырьками над коллектором.

Брызгозащищенными называются электродвигатели, имеющие защитные приспособления против водяных капель, падающих сверху под углом до 45° к вертикали. На рис. 2 изображена брызгозащищенная машина типа ПН.
Водозащищенными называются электродвигатели, имеющие защитные приспособления, не допускающие попадания внутрь воды при обливании их водой под давлением 2 атм с расстояния 5 м в любом направлении в течение 5 мин.

Герметическими называются электродвигатели, имеющие плотно закрытый корпус, не допускающий проникновения воды внутрь при работе в погруженном состоянии в воду на глубину 10 м в течение 30 мин.
Взрывобезопасными называются электродвигатели, которые при взрыве внутри их газа или пыли не допускают передачи огня наружу или конструкция которых предупреждает возможность возникновения взрыва внутри.
Разновидностью закрытых машин являются закрытые вентилируемые и закрытые обдуваемые машины: первые — со специальными патрубками для подвода и отвода (по трубам) воздуха, необходимого для вентиляции машины, и вторые — с дополнительным вентилятором, прогоняющим воздух по наружной поверхности машины («обдувающим» ее).
На рис. 3 изображена закрытая обдуваемая машина типа ПН.
При выборе перечисленных исполнений электродвигателей руководствуются следующими соображениями:
а) электродвигатели, устанавливаемые в местах, где они подвергаются попаданию воды, масла и т. п. только в вертикальном направлении (сверху), могут быть открытыми, но должны при этом снабжаться специальными защитными козырьками;
б) электродвигатели, устанавливаемые в местах, где они подвергаются попаданию брызг воды от любых источников, должны быть брызгозащищенными;

в) электродвигатели, устанавливаемые на верхних палубах или в местах, где они могут оказаться под воздействием потока воды, должны быть водозащищенными;
г) электродвигатели, устанавливаемые в помещениях, где имеются воспламеняющиеся газы или пыль, должны быть взрывобезопасными.
Наибольшее распространение на судах получили брызгозащищенные и водозащищенные электродвигатели.
По расположению вала различают горизонтальные и вертикальные электродвигатели. Последние занимают меньшую площадь, чем горизонтальные, поэтому нашли широкое применение для приводов различных насосов, устанавливаемых в машинном отделении.
Часто на судах используют фланцевые электродвигатели. У этих двигателей крышки со стороны привода снабжены фланцем, к которому и крепится фланец корпуса механизма (чаще всего вентилятора или центробежного насоса). Крылатка вентилятора или насоса в этом случае насаживается на вал электродвигателя. Фланцевые электродвигатели бывают как горизонтальные, так и вертикальные.
При работе электродвигателя часть потребляемой им из сети энергии превращается внутри его в тепло. Если бы при этом не происходило отдачи тепла электродвигателем в окружающее пространство, то нагрев электродвигателя достиг бы недопустимо большой величины, при которой пострадали бы обмотки и другие его части. Поэтому электродвигатели рассчитываются таким образом, чтобы при том или ином режиме их работы по истечении некоторого времени устанавливалось тепловое равновесие, при котором количество образующегося в электродвигателе тепла было бы равно количеству тепла, отдаваемого электродвигателем в пространство, а сам электродвигатель был бы нагрет лишь до определенной, допускаемой нормами, температуры.
Для электродвигателей установлены три режима работы: а) продолжительный, б) кратковременный и в) повторно-кратковременный.
Электродвигатель, рассчитанный на продолжительный режим работы, т. е. на продолжительную нагрузку, может работать без остановки в течение любого по длительности времени (при условии, что нагрузка не будет превышать номинальной величины, указываемой на его паспортном щитке).
Электродвигатель, рассчитанный на кратковременный режим работы, т. е. на кратковременную нагрузку, может работать без остановки лишь в течение того промежутка времени, который указывается на щитке электродвигателя (например, полчаса, час, полтора или два часа), после чего должен останавливаться и запускаться вновь не раньше, чем он охладится до температуры окружающей среды. Нагрузка при этом не должна превышать номинальной величины, которая указывается на паспортном щитке электродвигателя.
Электродвигатель, рассчитанный на повторно-кратковременный режим работы, при котором работа все время чередуется с остановками, может работать в течение любого интервала времени при условии, что при этом выдерживается указанная на паспортном щитке электродвигателя так называемая относительная продолжительность включения (обозначается ПВ). Если обозначить tраб — период работы двигателя и toст — длительность следующей за ним остановки двигателя, то относительная продолжительность включения, выражаемая обычно в процентах, представит собой следующее соотношение:


Нормальными величинами относительной продолжительности включения ПВ считаются 15, 25 и 40%. Очевидно, что наиболее легкими условиями работы электродвигателя будут такие, когда ПВ — 15% и наиболее тяжелыми, — когда ПВ = 40%.
При расчете электродвигателя, предназначенного для повторно-кратковременного режима работы, предполагается, что длительность кратковременного периода работы tраб и следующего за ним кратковременного периода остановки tост практически не будет превышать 10 мин, т. е. tраб + tост = 10 мин.
Для каждого из этих трех режимов работы температура нагрева частей электродвигателя не должна превышать величины, допускаемой нормами Регистра. Температура окружающей среды принимается для судов равной +40° С. Допускаемое превышение температуры электродвигателя над температурой окружающей среды установлено нормами Регистра для различных частей двигателя в пределах от 55 до 80° С с учетом рода изоляции, примененной при изготовлении двигателя.
Выбор электродвигателя, рассчитанного на тот или иной режим работы, производится в зависимости от условий работы приводимого им в движение механизма. Так, например, для грузовых лебедок выбираются электродвигатели, рассчитанные на повторно-кратковременный режим работы, что соответствует характеру работы лебедки; для значительной части судовых вспомогательных механизмов, работающих длительное время, выбираются электродвигатели, рассчитанные на продолжительный режим работы.
Управление электродвигателем сводится к пуску, реверсу, остановке, торможению и изменению скорости его вращения.
В зависимости от способа воздействия на пускорегулирующую аппаратуру различают ручное, полуавтоматическое и автоматическое управление электродвигателям.
По роду применяемой аппаратуры управление может быть реостатным, контроллерным, контакторным и по системе генератор-двигатель.
При ручном управлении все операции по изменению состояния электродвигателя осуществляются непосредственным воздействием на пускорегулирующую аппаратуру электродвигателя: рубильники, пакетные выключатели и магнитные пускатели (при прямом пуске), пусковые, регулирующие или пускорегулирующие реостаты и контроллеры.
При электродвигателях значительных мощностей аппаратура ручного управления (реостаты и контроллеры) становится тяжелой и громоздкой, а манипуляции с ней требуют значительных физических усилий, что затрудняет управление.
Ручное управление электродвигателями требует от оператора определенных навыков. При неправильных манипуляциях возможны обесточивание установки из-за срабатывания автомата генератора (вследствие недопустимого толчка пускового тока при слишком быстром пуске), перегрев пусковых сопротивлений (при слишком замедленном пуске), повышенный динамический удар (при резком торможении) и т. п. Поэтому при ручном управлении снижается надежность работы электродвигателей, и в настоящее время оно применяется в основном для электродвигателей небольшой мощности со сравнительно редкими пусками и остановками.
Полуавтоматическое управление электродвигателем осуществляется при помощи релейно-контакторной аппаратуры. Воздействие на эту аппаратуру (для соответствующего замыкания и размыкания цепей питания катушек контакторов и реле) производит оператор при помощи ручных аппаратов: кнопок управления или командоконтроллеров. Весь же процесс изменения состояния электродвигателя происходит автоматически в нужной последовательности и с нужными выдержками времени независимо от оператора.
Для полуавтоматического управления от персонала не требуется высокая квалификация. Для манипуляции с командоконтроллерами и кнопками управления не нужно больших физических усилий; кроме того, эти усилия совершенно не зависят от мощности электродвигателя. При таком способе управления повышается надежность работы электродвигателей, облегчается их блокировка, становится возможным дистанционное управление, а также одновременное управление несколькими электродвигателями из одного места (например, управление двумя грузовыми лебедками одним лебедчиком).
Преимущества полуавтоматического управления обусловили его значительное распространение на судах.
При автоматическом управлении обслуживающий персонал не участвует в управлении электродвигателем. Роль оператора сводится к первоначальной наладке системы и дальнейшему периодическому наблюдению за ее состоянием. Начальные импульсы для пуска или остановки электродвигателя подаются специальными аппаратами, так называемыми датчиками. Такими датчиками могут служить реле, реагирующие на изменение давления, температуры какой-либо среды, уровня жидкости в сосуде или отсеке судна и т. д.
За последние годы автоматическое управление электродвигателями на судах получает все большее распространение. Автоматизируется управление насосами водоснабжения, климатическими установками, компрессорами, холодильными установками, механизмами, обслуживающими работу паровых котлов и т. д.
Автоматическое управление значительно облегчает работу судового персонала, освобождая его от необходимости непрерывно наблюдать за работой механизмов.
Судовые нагнетатели по числу и общей мощности являются основной группой потребителей электроэнергии. Укрупненно их можно разделить на две большие группы: судовые вспомогательные механизмы, которые обслуживают главную силовую установку, и механизмы судовых систем.

Судовые насосы различают: по принципу действия — центробежные, осевые, поршневые, ротационные, электромагнитные; по назначению — охлаждающие, циркуляционные, питательные, балластные, пожарные, креновые, санитарные, грузовые и т. д.; по роду обрабатываемой среды — водяные (забортной, пресной, горячей, холодной, питьевой, мытьевой воды), топливные, масляные; по величине давления; по производительности; по способу установки — вертикальные, горизонтальные, стационарные и переносные.
Вентиляторы различают: по принципу действия — центробежные, пропеллерные; по назначению — машинные, котельные, жилых помещений, трюмные; по напору — низкого (до 100 Па), среднего давления (100—300 Па) и высоконапорные (300—1500 Па); по характеру установки — стационарные, переносные, настольные.
Компрессоры различают: по принципу действия — поршневые, центробежные; по роду обрабатываемой среды — воздушные, аммиачные, фреоновые, газовые; по давлению — низкого, среднего и высокого давления; по назначению — главные (пускового воздуха), вспомогательные, аварийные, рефрижераторные, специальные; по производительности; по числу ступеней сжатия — одноступенчатые w многоступенчатые.
Требования к электроприводу судовых нагнетателей могут быть разделены на две группы: первая из них определяется системой или установкой, которую они обслуживают; вторая связана с обеспечением пожаробезопасности, поскольку они перемещают горючие среды или среды, поддерживающие горение, либо обеспечивающие пожаротушение.
Назначение и вытекающие из него требование весьма разнообразны и могут быть сведены к следующим:
- обеспечение достаточной производительности и давления; равномерность подачи: возможность регулирования производительности и напора; экономичность работы и регулирования производительности; надежность работы и резервирование.
- Вторая группа требований, определяемая безопасностью мореплавания и надежностью электроснабжения; питание пожарных осушительных насосов, а также компрессоров и насосов спринклерной системы должно осуществляться от ГРЩ;
- электроприводы топливных, маслоперекачивающих насосов и сепараторов должны иметь дистанционное отключение, а отключаться вне шахт и помещений, где они установлены;
- электродвигатели аварийных осушительных насосов должны иметь возможность пуска с поста, расположенного выше палубы переборок;
- электродвигатели насосов, откачивающие жидкости за борг з местах спуска аварийно-спасательных средств, должны иметь у постов спуска этих средств выключатели;
- электродвигатели вентиляторов машинных отделение должны иметь два выключателя, один из которых должен быть вне машинных отделений и шахт в легко доступном с главной палубы месте;
- вентиляторы грузовых трюмов и камбузов должны иметь отключающие устройства в доступных с главной палубы местах вне шахт МКО, все электродвигатели других вентиляторов должны отключаться из двух мест, удаленных друг от друга;
- электродвигатели общесудовой вентиляции должны иметь одно отключающее устройство на ПУ судном, второе — в вахтенном помещении или другом, доступном с главкой палубы месте, удаленном от ПУ.
Режимы работы и характеристики судовых нагнетателей определяются их назначением и принципом действия. Подавляющее большинство этих приводов являются нерегулируемыми и рассчитаны на продолжительный режим работы (вентиляторы, циркуляционные и охлаждающие насосы, сепараторы и т. д.), некоторые работают эпизодически и кратковременно (топливоподкачивающие, трюмно-осушительные), другие — в повторно- кратковременном режиме (санитарные насосы, компрессоры рефрижераторов и др.). Мощность на валу центробежного нагнетателя определится производительностью и давлением:

где Q — производительность (объемный расход), м 3 /с; H — давление (напор), Па; η — к. п. д. нагнетателя.

Рис. 1. Характеристики нагнетателей и системы
Соотношение этих величин определяется H — Q характеристикой нагнетателя H = f(Q). Рабочая точка определяется пересечением H — Q характеристики нагнетателя с H — Q характеристикой системы, на которую он работает. На рис. 1, а зависимость H = f(Q) нагнетателя дана для различной частоты вращения (кривые 1, 2, 3). Жесткость характеристики зависит от профиля лопаток: для радиальных лопаток (кривая 4) она жестче, чем для лопаток отогнутых назад, в сторону, противоположную направлению вращения (кривые 1, 2, 3). Уравнение характеристики системы может быть представлено в виде параболы: H = Hст + kсQ 2 , где Hст = Hг + Hпр — напор статический, обусловленный геометрическим напором Hг (разность уровней в емкостях нагнетания и всасывания) и напором противодавления Hпр (давление в емкости, куда нагнетается жидкость или газ); kс — коэффициент местных потерь, учитывающий гидравлические потери в трубах, клапанах, фильтрах и т. д.
Кривые 5 и 7 свойственны системам, где Hст = 0, причем кривая 7 соответствует системе с большим сопротивление kс, кривые 6 и 8 относятся к системам со статическим напором, кривая 3 характеризует систему с большим kс.
При известной мощности момент на валу двигателя:

Для центробежных нагнетателей, работающих на систему без значительного статического напора, в оценке нагрузи двигателя при регулировании частотой вращения могут быть приняты следующие соотношения:

Для систем с противодавлением необходимые режимы могут быть рассчитаны только путем совместного анализа характеристик системы и нагнетателя. Зависимость мощности от куба, a момента от квадрата частоты вращения, создает легкие условия пуска двигателя. Характеристику M = f(n 2 ) называют вентиляторной и считают благоприятной для пуска, так как нагрузка при пуске очень мала. В то же время даже незначительное повышение частоты вращения сверх номинальной может привести к значительной перегрузке двигателя. При увеличении n, например, на 10% мощность возрастает на 33%.
Производительность центробежных нагнетателей сложно регулировать заслонкой вплоть до полного перекрытия системы. Напор хотя и возрастает, но остается в допустимых пределах. Этим свойством центробежных нагнетателей широко пользуются для регулирования производительности. Однако этот способ неэкономичен. На рис.1 рабочая точка А соответствует полностью открытому клапану на системе с характеристикой 5.
Для уменьшения расхода вдвое заслонка перекрывается так, чтобы характеристика прошла через точку Б. При этом напор возрастает, а мощность на валу если и уменьшается, то незначительно.
Снизив частоту вращения настолько, чтобы не перекрывая клапана на системе 5, уменьшить производительность вдвое (точка Д), мощность нагнетателя будет определяться напором Hд = H/2 и производительностью Q = Qн/2, т. е. уменьшится против номинальной почти в четыре раза.
На характеристике А регулирование заслонкой более экономично, чем на характеристике 1. В точке Г напор возрастает незначительно, а производительность упадет вдвое по сравнению с номинальной (точка В). Однако и в этом случае регулирование частотой вращения оказывается более экономичным, чем заслонкой. Поэтому для таких крупных механизмов, как грузовые и циркуляционные насосы, котельные вентиляторы, применяют регулируемые приводы.
В электроприводах поршневых насосов мощность на валу определяется той же зависимостью (первая формула). Однако производительность здесь прямо определяется числом ходов поршня в единицу времени, т. е. частотой вращения двигателя: Qт = kn, где k — конструктивный коэффициент, учитывающий площадь и ход поршня, передаточное число, число цилиндров и т. д.
Действительная производительность будет меньше теоретической на величину объемных потерь на просачивание жидкости между стенками цилиндра и поршнем, в отсекающих клапанаx и т. д.
Поршневые насосы имеют характеристику H—Q, дающую крутой рост напора при уменьшении расхода клапаном на нагнетательной стороне (рис. 1, б), что может привести к повреждениям в системе. Уменьшение происходит здесь лишь за счет увеличения объемных потерь в насосе, если не считать снижения частоты вращения. Момент на валу насоса растет пропорционально напору, поэтому двигатель перегрузится или остановится под током, сработает отключающая защита.
Регулирование производительности поршневых насосов допустимо только частотой вращения, но не клапаном. В системах, где необходимо изменять расход, устанавливают регулируемый электропривод. Поршневые насосы характеризуются некоторой неравномерностью нагрузки по моменту, току и мощности. В отличие от центробежных механизмов они создают полную нагрузку по моменту во время пуска, что учитывают при выборе способа пуска.
Электроприводы поршневых компрессоров также характеризуются полным моментом при пуске и неравномерностью нагрузки, усугубляемой еще увеличением реакции на поршень по мере сжатия газа в цилиндре. Для выравнивания нагрузки двигателя на его вал устанавливают маховик или массивный шкив, что еще более утяжеляет разгон двигателя при пуске. Поэтому электроприводы компрессоров комплектуют электродвигателями с повышенным пусковым моментом. Мощность электродвигателя определяют по формуле:

где 1,1 - 1,15 — коэффициент запаса; Q — производительность на всасывающей стороне, м 3 /с; η к — к. п. д. компрессора.

Удельная работа сжатия при изотермическом цикле, Па (p1 и р2 — давления всасывания и сжатия соответственно).
Производительность судовых компрессоров обычно не регулируют. Изменение расхода сжатого газа вызывает лишь изменение относительной продолжительности включения двигателя. Это достигается автоматически схемой, включающей электропривод при снижении давления газа в приемном ресивере: чем больше расход газа, тем чаще и на большее время включается компрессор. Так работают компрессоры пускового воздуха, холодильных и климатических установок.
Управление электроприводами судовых нагнетателей выполняется по схемам, которые можно разделить по двум признакам: роду тока и регулируемости. На постоянном токе для пуска нерегулируемых приводов применяют пусковые реостаты и контакторные станции, а для регулируемых приводов — пускорегулировочные реостаты или контакторный пуск при ручном управлении возбуждением двигателя. Лишь для крупных насосов (грузовых) применяют отдельные источники регулируемого напряжения.
На переменном токе обычной является схема прямого пуска асинхронного КЗ-электродвигателя с помощью магнитного пускателя. Если мощность привода соизмерима с мощностью генератора, применяют схемы непрямого пуска: через резисторы, дроссели, автотрансформаторы или переключением со звезды на треугольник. Для регулируемых приводов переменного тока применяются двух-и трехскоростные электродвигатели.
В схеме пуска центробежного насоса через резисторы в цепи статора (рис. 1) поступление питания указывает лампа ЛЖ; сработает реле РУ. Нажатием кнопки «Пуск» включается реле УР, а его контактами — контактор У. Двигатель включится в сеть через резисторы.
Блок-контакты контактора У отключат реле РУ, которое начнет отсчет времени. Одновременно блок-контакты У подготовят цепь реле ЛР.

Рис. 2. Схема пуска электропривода пожарного насоса
После отпускания якоря реле РУ замкнет свои контакты и цепи ЛР, которое включит линейный контактор Л, шунтирующий пусковые резисторы, УР отключается блок-контактами Л, цепь резисторов разрывается. Пуск окончен, о чем сигнализирует лампа ЛБ. Реле РБ служит для отключения пусковой части схемы (УР и У) по окончании пуска.
Защита привода: минимально-нулевая — контактором Л; токовая — тепловыми реле 1РТ; 2РТ; от КЗ в цепях управления — предохранителями. После нажатия кнопки необходимо убедиться в том, что пуск окончен — по лампе ЛБ. Если не произойдет включения ЛБ, то это будет свидетельствовать о невключении Л, пусковые резисторы остались под током. Нужно отключить насос кнопкой «Стоп» и выяснить причину отказа пусковой схемы. В противном случае резисторы сгорят, они рассчитаны на работу лишь во время пуска.
Основные положения по эксплуатации электроприводов судовых нагнетателей сводятся к поддержанию в рабочем состоянии контактной аппаратуры, подшипников электродвигателей и сигнализации цепей управления. Поскольку большинство приводов на ходу судна работает постоянно, необходим ежедневный контроль за состоянием электромашин и аппаратуры, наличием и исправностью сигнальных ламп и средств контроля.
При осмотрах необходимо обращать особое внимание на повышение температуры подшипников, появление в них вибрации или шума. Периодический контроль состояния изоляции выполняется приборами ГРЩ, а неработающих механизмов — переносными мегомметрами. Важным условием для поддержания работоспособности всех механизмов является соблюдение заводских инструкций и графиков профилактических осмотров и ремонта.
Асинхронные электродвигатели просты по конструкции, экономичны и надежны в работе. На судах асинхронные двигатели применяют для привода различных машин, механизмов и устройств; они составляют 80—90% общего числа устанавливаемых на судне электродвигателей.
Принцип действия асинхронного трехфазного двигателя основан на использовании вращающегося магнитного поля. На рис. 1,а представлена модель, поясняющая работу двигателя. При вращении постоянного магнита с частотой n1 в неподвижном замкнутом витке индуктируется э. д. с. Е и протекает ток I, направление которых определяется правилом правой руки.

А—X, B—Y, С—Z — соответственно начала и концы фазных обмоток статора; Ф - распределение силовых линий вращающегося магнитного поля; 1 — ротор; 2 — статор
В результате взаимодействия активных сторон витка, по которым протекает ток I, с вращающимся полем постоянного магнита создается пара сил F—F (правило левой руки), под действием которой возникает вращающий момент в направлении вращения поля. Виток будет вращаться с частотой n21, т. е. асинхронно.
На рис. 1,б показан простейший асинхронный двигатель. В пазах внутренней поверхности неподвижного стального цилиндра (статора) уложена трехфазная обмотка так, что оси катушек АХ, BY и CZ лежат в одной плоскости под углом 120° относительно друг друга.
Из электротехники известно, что при подключении такой обмоки в сеть трехфазного переменного тока обмотка создает вращающееся магнитное поле. На рис. 1,б показано распределение силовых линий Ф вращающегося магнитного поля в рассматриваемый момент времени. Результирующий магнитный поток будет действовать по оси условных полюсов NS (показаны пунктиром).
Для уменьшения магнитного сопротивления и увеличения вращающего момента активные стороны замкнутого витка размещаются в пазах вращающегося стального сердечника (ротора). Под действием поля статора, вращающегося с частотой n1, ротор будет вращаться в том же направлении с частотой n21. Соблюдение этого соотношения является необходимым условием для нормальной работы двигателя, так как при n2=n1 (синхронная частота вращения) исчезает вращающий момент.
Так как магнитное поле статора и ротор вращаются в одном направлении, то разность их частот вращения определяет скорость перемещения потока относительно ротора n1—n2=ns.
Относительная разность частот вращения поля статора и ротора называется скольжением:


Для увеличения вращающего момента асинхронного двигателя в пазах его ротора укладывают большое число витков, которые образуют обмотку ротора.
По конструкции обмотки ротора асинхронные двигатели выполняют двух видов: с короткозамкнутым ротором и с фазным ротором.
Обмотку короткозамкнутого ротора выполняют из латунных или медных стержней, которые вставляют в неизолированные пазы ротора и по торцам замыкают накоротко медными кольцами (рис. 2,а). Такая обмотка получила название «беличья клетка». Наиболее широко применяют «беличью клетку», изготовленную путем заливки под давлением пазов ротора алюминиевым сплавом (рис. 2,б). При этом одновременно отливают торцевые кольца с вентиляционными лопастями.
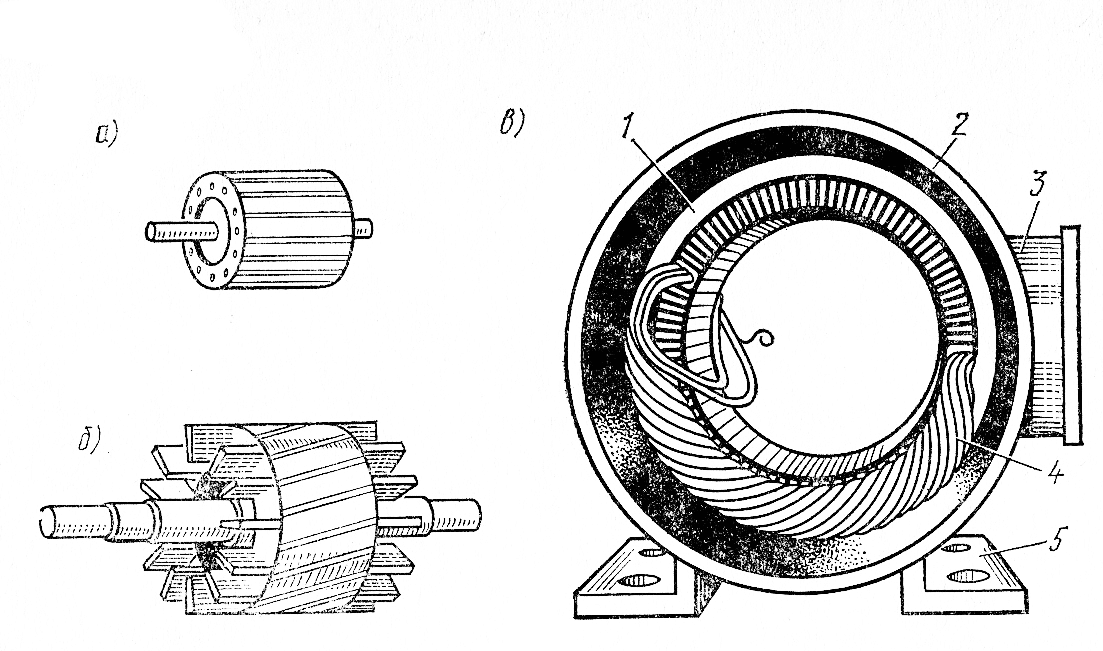
1— сердечник статора; 2 — станина (корпус); 3 — выводная коробка; 4 — укладка двухслойной обмотки; 5 — лапы
Обмотка фазного ротора состоит из трех катушечных групп. Катушки наматывают изолированным медным проводом и вставляют в изолированные пазы ротора. Катушки каждой группы, соединенные по определенной схеме, образуют однофазные обмотки. Полученную таким образом трехфазную обмотку соединяют обычно звездой и подключают к трем изолированным контактным кольцам, укрепленным на валу ротора.
На судах в основном применяют асинхронные двигатели с короткозамкнутым ротором. Для уменьшения потерь стали сердечники статора и ротора набирают из штампованных листов электротехнической стали толщиной 0,5 мм, изолированных один от другого лаковой пленкой. Сердечник ротора жестко крепят на стальном валу. Сердечник статора запрессовывают в стальную или из алюминиевого сплава станину (рис. 2,в), которая является несущей конструкцией машины. На торцах станина заканчивается съемными подшипниковыми щитами, в которые устанавливают концами вал ротора с подшипниками.
Так как обмотки статора и ротора связаны между собой только посредством магнитного потока, создаваемого статором, то величину воздушного зазора δ между статором и ротором делают по возможности меньше (δ = 0,25-0,35 мм у машин малой мощности и δ = 1-1,5 мм у машин большой мощности). Нижний предел зазора ограничивается по механическим соображениям.
Асинхронные машины обратимы и могут работать в режиме двигателя или генератора. Однако при работе в режиме генератора асинхронные машины потребляют из сети реактивный ток и значительно снижают коэффициент мощности сети, поэтому их в основном используют в качестве двигателей. Наибольшее распространение на судах получили асинхронные двигатели серии AM (морского исполнения).
Для улучшения условий охлаждения у асинхронных двигателей применяют наружный вентилятор, а внешнюю поверхность корпуса статора делают ребристой.
Трехфазные обмотки статора асинхронных двигателей и синхронных генераторов выполняют одинаково. На рис. 1,б была показана простейшая трехфазная обмотка из трех витков, расположенных под углом 120° друг к другу.
Такая обмотка создает слабое вращающееся магнитное поле у двигателей и небольшую э. д. с. у генераторов, поэтому в реальных машинах трехфазная обмотка состоит из многовитковых катушек.
Ширина витка катушки (шаг Y обмотки), как и у машин постоянного тока, должна быть примерно равна полюсному делению τ (рис. 3). Катушка наматывается медным изолированным проводом и ее активные стороны укладывают в два изолированных паза сердечника статора. Одну сторону катушки укладывают в паз под одним полюсом, а вторую — под другим. Это необходимо для суммирования э. д. с. витков катушки у генераторов и м. д. с. — у двигателей.

Для образования трехфазной обмотки необходимо, чтобы под каждым полюсом находились стороны катушек всех трех фаз. У генераторов реальные полюсы расположены на вращающемся роторе, а у синхронных двигателей условные «вращающиеся» полюсы создаются вращающимся полем трехфазной обмотки статора.
В зависимости от числа пар полюсов p машины обмотки фаз могут иметь различное число катушек, соединенных между собой по определенной схеме и образующих катушечную группу фазы. В трехфазной машине обмотка статора состоит из трех отдельных обмоток фаз, которые могут быть соединены между собой звездой или треугольником.
Различают обмотки одно- и двухслойные, сосредоточенные и распределенные, волновые и петлевые.
В однослойных обмотках каждая активная сторона катушки занимает один паз и число катушек вдвое меньше числа пазов (см. рис. 3). В двухслойных обмотках все катушки имеют одинаковые размеры, одна сторона катушки лежит в верхней половине паза, другая — в нижней. Число катушек равно числу пазов. На рис. 2,в показана укладка двухслойной обмотки.
Катушки обмотки фазы соединяют одну с другой со стороны лобовых частей. Начала и концы обмоток выводят в выводную коробку и обозначают: первая фаза Cl—С4, вторая С2—С5, третья С3—С6. В полузакрытые пазы статора с уложенной обмоткой вставляют деревянные или текстолитовые клинья, а всю обмотку пропитывают специальным лаком и покрывают изоляционной эмалью.
Корабли будут становиться все более электрическими, предсказывал авторитетнейший академик-кораблестроитель Валентин Пашин. В 2011 году, когда задумали постройку норвежского электрического парома "Ампер", электрических судов в мире, практически, не было. Сегодня около двухсот паромов и буксиров имеют тяговые батареи на борту. Чем вызван растущий интерес к электродвижению мы разбирались вместе с директором "Научно-производственной компании "Энергодвижение" Вячеславом Клинцевичем.

– Ведущие японские корпорации решили построить полностью электрический 62-метровый танкер-бункеровщик. Потенциал национального рынка электросудов они оценили в семь тысяч штук. Вы разделяете этот оптимизм? Какие типы судов могут в обозримой перспективе полностью перейти на электродвижение?
 |
| Клинцевич В. Ю., генеральный директор ООО "НПК "Энергодвижение" |
– Оптимизм разделяю, но вряд ли речь будет идти о семи тысячах 62-метровых судов. То, что японцы в ближайшее время построят и будут эксплуатировать большое количество различных судов с электродвижением, сомнения не вызывает.
Если говорить о типах… Электродвижение настолько гибкий инструмент, что его можно использовать в любых типах судов и кораблей вне зависимости от размеров. Единственное, где могут возникнуть сложности – маленькие мощные скоростные катера, каждый килограмм которых имеет значение. В данной сфере, как и в авиации, лишнее преобразование означает дополнительные килограммы, а для маленьких катеров – вес очень важен. Поэтому, как в авиации, там проще использовать схему: маленький газотурбинный двигатель – планетарный редуктор – водомет. Но есть и еще один важный момент! Если говорить о роботизированном необитаемом судне, то на нем система электродвижения будет предпочтительней, т.к. значительно упростится управление. Также следует принять в расчет использование энергии ходовых электростанций для энергоемкой "полезной нагрузки".
– Идеи, заложенные конструкторским бюро "Морская Техника" в гибридный катер проекта ST23WIM-H, понятны. При номинальных режимах движения используется дизельный двигатель, когда требуется мощность поменьше – судно движется на батареях. Это повышает энергоэффективность катера и экономит ресурс ГД…
– Эта гибридная система уже применяется на земле в электромобилях, энное количество лет назад мы проектировали такую систему с валогенератором. Это электрическая машина, которая стоит на главном валу и работает как генератор для питания собственных нужд и заряда аккумуляторов, а также как двигатель для обеспечения движения судна при выключенном главном двигателе.
Гибридная система, наверное, наиболее перспективная в наших суровых краях, по крайней мере, пока аккумуляторная промышленность не сделает шаг вперед.
– Насколько система электродвижения удорожает судно и сколько позволяет экономить топлива?
– Гибридная схема, действительно, увеличивает стоимость судна – добавляются электрические машины, преобразователь частоты, аккумуляторы и система управления. Их цена зависит от мощности, емкости, серийности, и назвать стоимости можно лишь с привязкой к конкретным образцам. Однозначно могу сказать, что работа главного двигателя на оптимальной для него частоте вращения, а не на частоте оптимальной для генератора, увеличит срок службы ГД, а также даст экономию топлива. Движение в порту за счет аккумуляторов также сохранит моторесурс главного двигателя и уменьшит расход топлива. Не стоит забывать и про портовые взносы за загрязнение атмосферы.
– Какие схемы электродвижения сегодня наиболее популярны?
 |
| Гребной электродвигатель 850 кВт / ООО "НПК "Энергодвижение" |

– Что входит в стандартный комплект оборудования систем электродвижения?
– Источник электроэнергии – это электростанция или аккумуляторы, распределение – на переменном токе или на постоянном токе, привод – гребной двигатель, полезная нагрузка – собственные нужды или что-то иное.
– Какие типы ГД могут использоваться в таких решениях?
– Любые – двигатель внутреннего сгорания, газотурбинный или паротурбинный двигатель.
– Популярнее схемы на постоянном или переменном токе?
– В основном, применяются схемы на переменном токе, со стандартной частотой 50 Гц, системой синхронизации электростанций и трансформаторами напряжения. Системы на постоянном токе чаще используют в подводной технике.
Распределение выполненное на напряжении постоянного тока обладает рядом преимуществ, о чем мы уже неоднократно писали в отчетных материалах по различным НИР и ОКР. Такую систему мы пытаемся внедрить уже более 15 лет. При этом наши зарубежные партнеры уже реализовывали ОКР с созданием стендов и доказали ее эффективность. Мы же продолжаем бороться с "традициями" и убежденностью, что "механизм работает – не мешай ему".
– Не станем сравнивать гребной электродвигатель с постоянными магнитами с коллекторными машинами постоянного тока, а вот чем он предпочтительнее асинхронных или синхронно-реактивных машин?
– Все типы электрических машин хороши, у каждой свои плюсы и минусы, свое назначение. С точки зрения КПД, моментов, эластичности управления и прочего, наилучшим, на мой взгляд, является электродвигатель постоянного тока. Но у него есть слабое место – это коллектор. Машину с постоянными магнитами можно сравнивать с машиной постоянного тока по моментным характеристикам, эластичности управления, но у нее нет коллектора!
Машина с постоянными магнитами с момента ее изобретения наделена энергией магнитов, нет необходимости тратить энергию на ее возбуждение – вот вам первый шаг к экономичности.
– Почему некоторые серьезные компании используют для гребной электрической установки мощностью до 5-8 МВт асинхронные машины с короткозамкнутым ротором?
– Первая причина – это традиция, применяем то, что использовали ранее. Во-вторых, применяется то, что производится серийно, а значит стоит дешевле. И, наконец, существует страх дать ход новому решению, даже если это уже где-то испытанно и применяется. Хочу выразить огромную благодарность конструкторам судов, кораблей и аппаратов, которые находят в себе силы не бояться новаторских решений! Мы не можем стоять на месте, в противном случае, окажемся в хвосте прогресса.
– Энергетическая схема новых мощных российских ледоколов вызывала споры. Победили сторонники дизель-электрической модели с ВРК. Их соперники утверждали, что потери энергии в дизельной установке с ВРШ меньше, эта схема проще и дешевле. На чьей стороне истина?
– Как уже сказал ранее, каждое решение имеет свои плюсы и минусы, необходимо оценить очень много параметров, чтобы выбрать оптимальное решение. По моему мнению, ледоколы в России должны быть атомно-электрическими.
– Есть пример атомного лихтеровоза "Севморпуть", где использована паротурбинная установка с винтом регулируемого шага…
– Хороший пример, показатель того, что в и в 1980-х годах придерживались мнения, что для судов, эксплуатирующихся на севере, следует использовать атомный источник энергии. Относительно же ВРШ следует отметить, что сейчас технологии электродвижения шагнули вперед, появились доступные по цене и надежные преобразователи частоты, элементы системы распределения, появились технологии создания мощных частотно-регулируемых электродвигателей.
– Почему в России, в принципе, не очень популярны дизель-генераторные установки с регулируемой скоростью, оптимизирующие расход топлива и продлевающие срок службы ДВС? Сегодня в мире существуют уже инверторы на 15 МВт…
– Причина, наверное, в отсутствии комплексного подхода, никто не стремится использовать новые технологии. Существуют заводы, производящие дизельные ДВС, есть предприятия, выпускающие синхронные генераторы с внешним возбуждением. На их базе создают электростанции. Судовладелец хочет "дешевое" судно, следовательно, проектировщик закладывает в проект "дешевые" электростанции. Для того, чтобы электростанция была "дешевой", используют стандартные генераторы 50 Гц. Берут серийный дизельный ДВС и серийный 50 герцовый генератор, и просто их агрегатируют между собой.
Для того же, чтобы применить регулируемую скорость у ДВС, необходимо продумать всю систему судна, применить нестандартный генератор, нестандартный выпрямитель и так далее.
– Какие типы судов в первую очередь должны оборудоваться ЭДГУ?
– На мой взгляд, все суда с электродвижением.
– Насколько сложна интеграция мощных частотных приводов в электрическую систему судна?
– Не вижу больших сложностей, если и будет сложно, то только в первый раз. Считаю, что даже при модернизации или ремонте судна за счет применения компактных газотурбинных электростанций и исключения редукторов, систему электродвижения можно вместить в машинное отделение, где раньше стоял "ДВС-редуктор-вал-винт". Возможны и иные варианты.
– Фрагмент из доклада ФГУП "ЦНИИ им. акад. А.Н. Крылова" на II Российской научно-практической конференция судостроителей в октябре 2010 г.: "…одной из главных технических ошибок в прошедшие годы была неправильная позиция в развитии корабельной энергетики. Предложения ориентироваться на отечественные разработки… в электродвижении были отвергнуты заказывающими управлениями решительно… Попытки создать электродвижение по западному образцу потерпели и будут терпеть неудачу и впредь". Что такое "электродвижение по западному образцу"? Изменилась ли ситуация сегодня?
– На Западе тоже бардак в разработках, нет устоявшейся концепции, и мощная конкуренция в подходах, но, в отличие от нас, они не жалеют денег на новые разработки. Почему "по западному образцу"? Потому, что мировые гиганты входят в российский рынок очень мощно, пробивая себе дорогу любыми инструментами. Они заинтересовывают лица, принимающие решения, скидками, сроками и "особыми условиями". Эта ситуация характерна не только для судостроения.
– Первым в мире электрическим судном была восьмиметровая лодка, оборудованная двигателем постоянного тока Бориса Семеновича Якоби мощностью 550 Вт (0,75 л.с.). Если верить историкам, она вмещала 12 человек и в 1838 году развивала на Неве скорость 4,2 км/ч. Такие характеристики реальны?
– Если взглянуть с "философской" точки зрения, то скорость течения в Неве в среднем 3-4 км/ч, т.е. лодка сама собой может двигаться со скоростью 4,2 км/ч, если плыть по течению.
С технической точки зрения это возможно, но только в идеальных условиях, на лодке водоизмещающего типа с хорошими обводами (профилем), причем, скорость должна измеряться после разгонного более чем стометрового участка. Но 4.2 км/ч – это очень мало, пешком дойти быстрее.
– Большой вес цинкоплатиновых гальванических элементов был главным препятствием на пути развития проекта Якоби. Накопители энергии и сегодня остаются главной проблемой для конструкторов. В автомобильной отрасли поставлена задача снизить стоимость киловатта мощности батареи до 100 долларов. Какими параметрами оперируют сейчас в судостроении? Как вы относитесь к планам Илона Маска снизить стоимость кВт*ч батареи вдвое?
– Да, аккумуляторная промышленность стремительно развивается, и мы все ждем, когда аккумуляторы станут дешевыми и емкими. Уже сейчас повсеместно ездят электровелосипеды, самокаты и скутеры, совсем недавно мы и подумать о таком не могли.
Лет пятнадцать назад, когда мы впервые предлагали гибридную установку для автобуса, в ходу были прогнозы о существенном скачке в сфере аккумуляторов к 2025 году, так что с нетерпением ждем. Уверен, за электродвижением будущее.
Емкость, на мой взгляд, не совсем верно оценивать в долларах, скорее стоит измерять в массогабаритных параметрах, а только потом в долларах. Планы Маска поддерживаю, и думаю, что это точно скоро произойдет.
– Ваша компания создает синхронные электродвигатели на постоянных магнитах и агрегаты на их базе. Можно ли их использовать сегодня на коммерческих судах?


В настоящее время мы являемся разработчиком и изготовителем оборудования для подводных аппаратов (подруливающие и маршевые движители) и надводных судов и кораблей (различные привода и гребные двигатели). Для коммерческих судов мы готовы поставлять как системы электродвижения целиком, так и отдельные приводы и гребные двигатели.
За годы деятельности нами было выполнено более двадцати ОКР с созданием опытных образцов продукции, выполнено порядка десяти НИР, мы являемся разработчиком и поставщиком серийных изделий для нужд ВМФ. Наибольшими достижениями можно считать высокооборотные генераторы, позволившие создать судовые безредукторные газотурбинные электростанции 1 МВт 24 000 об/мин, 2 МВт 24 000 об/мин, 3 МВт 12 500 об/мин и 2 МВт 8000 об/мин.
Автор статьи

Читайте также:
- Возможно ли направление судьей судебного приказа непосредственно в банк
- Судно обеспечения пбу это
- Уважительные причины для восстановления пропущенного срока на обжалование решения суда
- В каком году в ссср впервые прошли всесоюзные выборы народных судей и присяжных заседателей
- Может ли свидетель просить разрешения удалиться из зала суда до окончания разбирательства дела