
Инерционные свойства судов в различных условиях
Обновлено: 18.04.2024
Маневрирование – изменение направления движения судна и его скорости с помощью руля, движителей, подруливающих устройств в целях обеспечения безопасности мореплавания или решения эксплуатационных задач (швартовка, постановка на якорь, проход узкостей и т. п.).
Маневренность определяется такими качествами судна, как скорость, ходкость, управляемость, устойчивость на курсе и поворотливость, а также инерционными характеристиками судна.
Маневренность судна не является постоянной. Изменение ее происходит под влиянием различных факторов (загрузки, крена, дифферента, ветра и т. д.), которые надлежит учитывать судоводителям при управлении судном.
Под ходкостью понимается способность судна преодолевать сопротивление окружающей среды и перемещаться с требуемой скоростью при наименьшей затрате мощности главных машин.
Скорость судна — одна из важнейших характеристик маневренных элементов судна. Скоростью судна считается та скорость, с которой оно перемещается относительно воды.
Управляемость — способность судна двигаться по заданной траектории, т. е. удерживать заданное направление движения или изменять его под действием управляющих устройств. Главными управляющими устройствами на судне являются средства управления рулем, средства управления движителем, средства активного управления.
Управляемость объединяет два свойства:
Устойчивость на курсе — это способность судна сохранять направление прямолинейного движения.
Поворотливость — способность судна изменять направление движения и описывать траекторию заданной кривизны.
Устойчивость на курсе и поворотливость находятся в противоречии друг с другом. Чем более устойчиво прямолинейное движение судна, тем труднее его повернуть, т. е. ухудшается поворотливость. Но с другой стороны, улучшение поворотливости судна затрудняет его движение в постоянном направлении, в этом случае удержание судна на курсе связано с напряженной работой рулевого или авторулевого и частой перекладкой руля. При проектировании судов стремятся найти оптимальное сочетание этих свойств.
Управляемость судна в основном определяется взаимным расположением трех точек:
- центра тяжести (ЦТ), центра приложения всех сил сопротивления движения и центра приложения движущих сил.
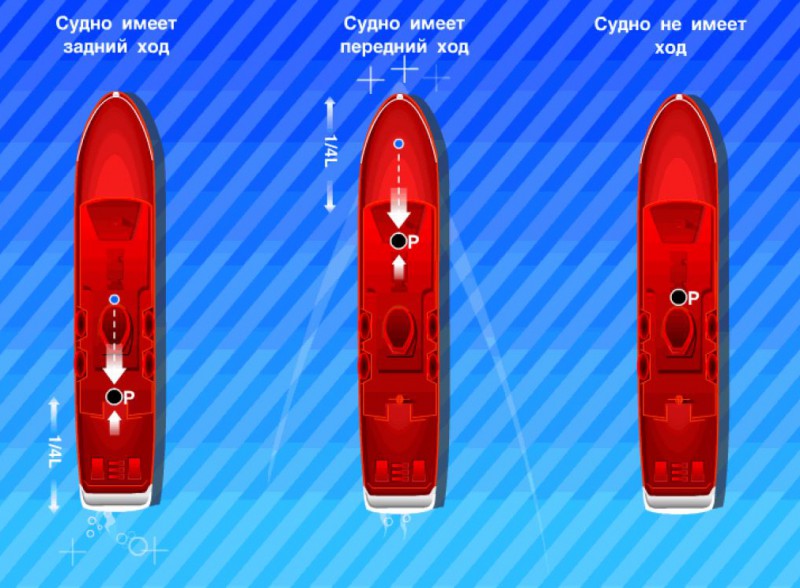
Вращательное движение судна происходит вокруг вертикальной оси – центра вращения (Pivot Point – P), проходящей через центр сил сопротивления. Положение этой оси на судне зависит от формы судна, направления и скорости движения судна, величины и точки приложения различных сил, действующих на судно (рис. 1).
Если центр тяжести при определенном состоянии загрузки судна остается неподвижным, то центр приложения сил сопротивления не имеет постоянного местоположения. В зависимости от движения судна суммарный вектор сил сопротивления водной и воздушной сред изменяется, и точка его приложения к судну обычно перемещается вдоль диаметральной плоскости.

Рис. 1 Расположение центра вращения судна
Если ЦТ располагается впереди центра сил сопротивления, то судно устойчиво на курсе и наоборот, если ЦТ располагается позади центра сил сопротивления, то судно неустойчиво на курсе и более подвержено рысканию. Расположение центра приложения движущих сил зависит от режима работы движителей, положения руля, воздействия ветра, течения и т. п. В зависимости от расположения указанных трех точек при движении судна могут произойти сопутствующие явления: крен, дифферент, поперечное смещение.
В результате воздействия обтекающих масс воды и ветра на корпус, винт и руль, даже при спокойном море и слабом ветре, судно не остается постоянно на заданном курсе, а отклоняется от него. Отклонение судна от курса при прямом положении руля называется рыскливостью. Амплитуда рыскания судна в тихую погоду небольшая. Поэтому для удержания его на курсе требуется незначительная перекладка руля вправо или влево. При сильном ветре и волнении устойчивость судна на курсе значительно ухудшается.
На рыскливость судна большое влияние оказывает расположение надстройки. На тех судах, где надстройки на корме, рыскливость увеличивается, так как почти всегда корма идет «под ветер», а нос — «на ветер». Если надстройка в носу, то судно уклоняется «от ветра».
Уклонение судна под ветер называется увальчивостью. Это свойство так же, как рыскливость, является недостатком судна, его всегда приходится учитывать при осуществлении различных маневров, особенно в стесненных условиях.
Силы и моменты, действующие на судно
Все силы, действующие на судно, разделяются на три группы:
К движущим силам относятся силы, создаваемые средствами управления:
- тягой винта, боковой силой руля, силами, создаваемыми средствами активного управления.
К внешним силам относятся силы давления ветра, волнения моря, давления течения.
К реактивным силам относятся силы, возникающие в результате движения судна под действием движущих и внешних сил. Они разделяются на инерционные – обусловленные инертностью судна и присоединенных масс воды и возникающие только при наличии ускорений. Направление действия инерционных сил всегда противоположно действующему ускорению. Неинерционные силы обусловлены вязкостью воды и воздуха и являются гидродинамическими и аэродинамическими силами.
Таким образом, полное сопротивление движению судна:
- Rт – сопротивление трения, вызванное взаимодействием корпуса судна и воды;
- Rф – сопротивление формы, вызванное распределением гидродинамических давлений вдоль корпуса судна;
- Rволн – волновое сопротивление, определяемое волнообразованием вдоль корпуса судна при его движении;
- Rвч – сопротивление выступающих частей корпуса судна, определяемое наличием руля, винта, скуловых килей и т. п.;
- Rвозд – аэродинамическое сопротивление движению судна.
Значения всех составляющих сопротивления зависят от главных размерений Определение главных размерений и водоизмещения буксирных судов судна и их соотношений, от формы обводов корпуса судна, формы и размеров палубных сооружений и скорости судна.
Мерой быстроходности судна является его относительная скорость – число Фруда – Fr:
- V – скорость судна, м/с;
- g – ускорение свободного падения (9,8 м/с);
- L – длина судна, м.
В зависимости от числа Fr суда делятся на тихоходные (Fr < 0,22), среднескоростные (Fr = 0,23 – 0,35) и быстроходные (Fr >0,35).
Маневренные характеристики судна
К основным маневренным характеристикам судна относятся:
- скорость судна при выполнении маневра;
- элементы циркуляции;
- путь и время торможения судна.
Эти характеристики определяются по результатам натурных маневренных испытаний судна Испытания и сдача судов после его постройки (сдаточных испытаний). Натурные методы получения маневренных характеристик основаны на последовательных определениях места судна в процессе проведения заданных маневров по различным ориентирам либо с использованием высокоточных навигационных систем.
Поворотливость судна
Циркуляцией называют траекторию, описываемую центром тяжести судна, при движении с отклоненным на постоянный угол рулем (рис. 3). Циркуляция характеризуется линейной и угловой скоростями, радиусом кривизны и углом дрейфа. Угол между вектором линейной скорости судна и диаметральной плоскостью называют углом дрейфа (β). Эти характеристики не остаются постоянными на протяжении всего маневра. Циркуляцию принято разбивать на три периода.
Маневренный период – это период, в течение которого происходит перекладка руля на определенный угол. С момента начала перекладки руля судно начинает дрейфовать в сторону, противоположную перекладке руля, и одновременно начинает разворачиваться в сторону перекладки руля. В этот период траектория движения центра тяжести судна из прямолинейной превращается в криволинейную, происходит падение скорости движения судна.
Эволюционный период – это период, начинающийся с момента окончания перекладки руля и продолжающийся до момента окончания изменения угла дрейфа, линейной и угловой скоростей. Этот период характеризуется дальнейшим снижением скорости (до 30 – 50 %), изменением крена на внешний борт до 10 0 и резким выносом кормы на внешнюю сторону.
Период установившийся циркуляции – это период, начинающийся по окончании эволюционного, характеризуется равновесием действующих на судно сил: упора винта, гидродинамических сил на руле и корпусе, центробежной силы. Траектория движения центра тяжести (ЦТ) судна превращается в траекторию правильной окружности или близкой к ней.

Рис. 3 Траектория судна на циркуляции
Траектория циркуляции характеризуется следующими элементами:
- Do – диаметр установившейся циркуляции – расстояние между диаметральными плоскостями судна на двух последовательных курсах, отличающихся на 180° при установившемся движении;
- Dц – тактический диаметр циркуляции – расстояние между положениями диаметральной плоскости (ДП) судна до начала поворота и в момент изменения курса на 180°;
- l1 – выдвиг – расстояние между положениями ЦТ судна перед выходом на циркуляцию до точки циркуляции, в которой курс судна изменяется на 90°;
- l2 – прямое смещение – расстояние от первоначального положения ЦТ судна до положения его после поворота на 90°, измеренное по нормали к первоначальному направлению движения судна;
- l3 – обратное смещение – наибольшее смещение ЦТ судна в результате дрейфа в направлении, обратном стороне перекладки руля;
- Тц – период циркуляции – время поворота судна на 360°.
Инерционные свойства судна
В различных ситуациях возникает необходимость в изменении скорости судна (постановка на якорь, расхождение и т. п.). Это происходит за счет изменения режима работы главного двигателя или движителей. После чего судно начинает совершать неравномерное движение.
Путь и время, необходимые для совершения маневра, связанного с неравномерным движением, называют инерционными характеристиками судна.
Инерционные характеристики определяются временем, дистанцией, проходимой судном за это время, и скоростью хода через фиксированные промежутки времени и включают в себя следующие маневры:
- движение судна по инерции – свободное (пассивное) торможение;
- активное торможение – торможение при помощи движителя;
- разгон судна до заданной скорости.
Свободное торможение характеризует процесс снижения скорости судна под влиянием сопротивления воды от момента остановки двигателя до полной остановки судна относительно воды. Обычно время свободного торможения считается до потери управляемости судна (рис. 4).
Активное торможение – это торможение при помощи реверсирования двигателя. Первоначально телеграф устанавливают в положение «Стоп», и только после того, как обороты двигателя упадут на 40-50 %, ручку телеграфа переводят в положение «Полный задний ход». Окончание маневра – остановка судна относительно воды (рис. 5).
Процесс активного торможения судна Оптимальные способы торможения судов с винтом фиксированного шага условно можно разделить на 3 периода:
- первый период (t1) – от момента начала маневра до момента остановки двигателя (t1 ~ 7-8 сек);
- второй период (t2) – от момента остановки двигателя до пуска его на задний ход;
- третий период (t3) – от момента пуска двигателя на задний ход до остановки судна или до приобретения установившейся скорости заднего хода.
Разгон судна – это процесс постепенного увеличения скорости движения от нулевого значения до скорости, соответствующей заданному положению телеграфа (рис. 6).
Рис. 4 Инерционные характеристики судна при свободном торможении Рис. 5 Инерционные характеристики судна при активном торможении Рис. 6 Инерционные характеристики судна при разгоне
Градация ходов
Самый малый передний ход (Dead slow ahead) – минимальные устойчивые обороты, при которых двигатель не глохнет (~ 25% ППХ).
Малый передний ход (Slow ahead) – скорость хода судна ~ 50% ППХ.
Средний передний ход (Half ahead) – скорость хода ~ 75% ППХ.
Полный передний маневренный ход (Full manoeuvring ahead) – полные обороты двигателя при работе на легком топливе (дизельное топливо) в маневренном режиме (- 90% ППХ).
Полный передний ход ходового режима (Full ahead for sea) – номинальные полные обороты двигателя при работе на тяжелом топливе – мазуте, при которых двигатель может работать «вечно» при должном техническом обслуживании, и соответствующая им скорость хода.
Самый полный передний ход (Emergency full ahead or Full ahead overall) – кратковременный режим работы двигателя, который может быть применен в практике управления судном только в аварийных ситуациях.

Рис. 7 Различные типы телеграфов
Градация ходов на задний ход аналогична переднему, только слово передний (ahead) необходимо заменить на задний (astern).
Винт рассчитан только для работы на передний ход, поэтому характеристики заднего хода отличаются от переднего. Упор заднего хода не менее чем на 10% меньше переднего, а у дизельных двигателей мощность заднего хода может достигать 60% переднего. На судах с турбиной имеются специальные турбины заднего хода, но и их мощность меньше на 30 – 40% турбины переднего хода.


В различных ситуациях возникает необходимость в изменении скорости судна (постановка на якорь, швартовка, расхождение и т. п.). Это происходит за счет изменения режима работы главного двигателя или движителей.
После чего судно начинает совершать неравномерное движение.
Путь и время, необходимые для совершения маневра, связанного с неравномерным движением, называют инерционными характеристиками судна.
Инерционные характеристики определяются временем, дистанцией, проходимой судном за это время, и скоростью хода через фиксированные промежутки времени и включают в себя следующие маневры:
движение судна по инерции - свободное торможение;
разгон судна до заданной скорости;
Свободное торможение характеризует процесс снижения скорости судна под влиянием сопротивления воды от момента остановки двигателя до полной остановки судна относительно воды. Обычно время свободного торможения считается до потери управляемости судна (рис. 1.26).
Разгон судна - это процесс постепенного увеличения скорости движения от нулевого значения до скорости, соответствующей заданному положению телеграфа (рис. 1.27).
Активное торможение – это торможение при помощи реверсирования двигателя. Первоначально телеграф устанавливают в положение «Стоп», и только после того, как обороты двигателя упадут на 40–50 %, ручку телеграфа переводят в положение «Полный задний ход». Окончание маневра - остановка судна относительно воды (рис.1.28).
Рис. 1.26. Инерционные характеристики судна при свободном торможении
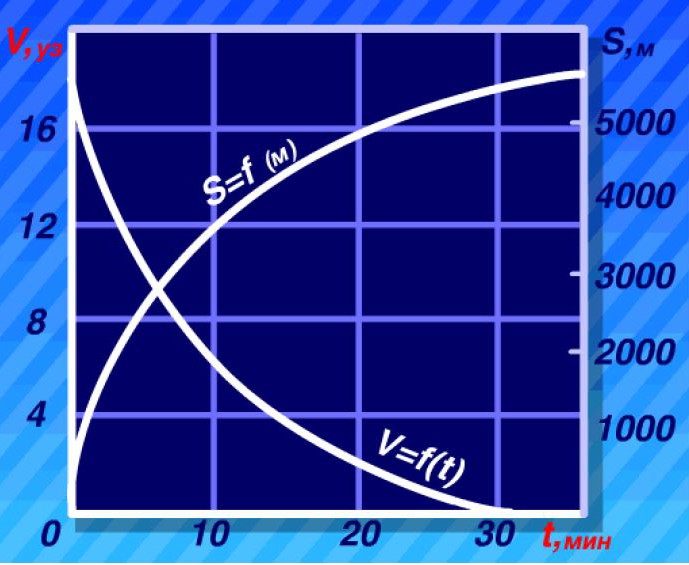
Рис. 1.27. Инерционные характеристики судна при разгоне
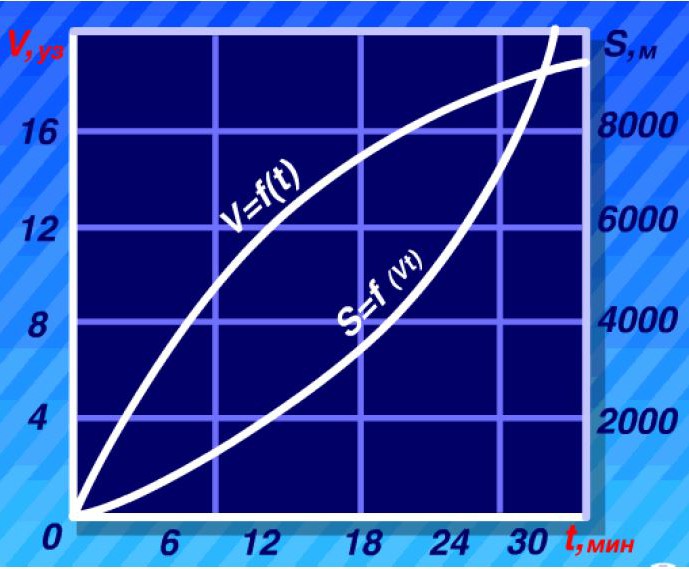
Рис.1.28. Инерционные характеристики судна при активном торможении
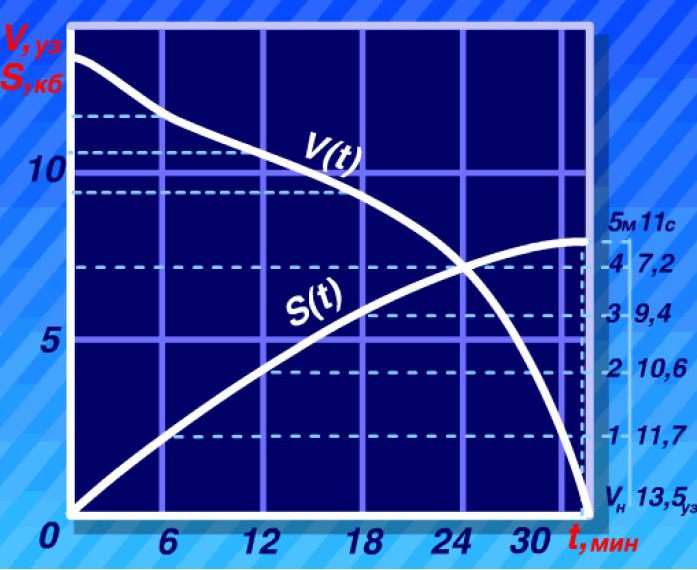
Процесс активного торможения судна с винтом фиксированного шага условно можно разделить на 3 периода:
первый период (t1) - от момента начала маневра до момента остановки двигателя (t1 ≈ 7–8 сек);
второй период (t2) - от момента остановки двигателя до пуска его на задний ход;
третий период (t3) - от момента пуска двигателя на задний ход до остановки судна или до приобретения установившейся скорости заднего хода. Движение судна в первые два периода можно рассматривать как свободное торможение.


Влияние мелководья на управляемость судна проявляется в снижении эффективности пера руля. Происходит это по следующим причинам. Как уже говорилось, движущееся судно имеет перепад давлений вдоль корпуса.
В результате этого уровень воды в средней части пониженный, а в районе форштевня и ахтерштевня - повышенный.
Перепад уровней воды в кормовой оконечности приводит к тому, что вода, перетекая от повышенного уровня к пониженному, образует попутный поток, скорость которого зависит от величины перепада уровней воды.
При движении судна на мелководье перепад давлений (и как следствие - уровней воды) увеличивается по мере приближения скорости судна к ее критическому значению Vкр .
Вращающий момент , создаваемый пером руля, при всех прочих равных условиях зависит от скорости набегающего потока. Увеличение скорости попутного потока при выходе судна на мелководье снижает скорость набегающего на перо руля потока и, как следствие, снижает эффективность рулевого устройства.
Другим фактором, влияющим на управляемость , является то, что при выходе судна на мелководье для сохранения прежней скорости требуются большие энергетические затраты, чем на глубокой воде.
Эта дополнительная энергия расходуется на то, что в процесс волнообразования вовлекаются дополнительные массы воды. Таким образом происходит увеличение кинетической энергии движущейся вместе с судном воды, а следовательно, и кинетической энергии системы “судно плюс присоединенные массы воды”.
Увеличение инерционности судна при падении эффективности пера руля приводит к ухудшению маневренных и тормозных характеристик судна.
Увеличение радиуса установившейся циркуляции на мелководье можно приблизительно определить из выражения:
Rоо - радиус установившейся циркуляции на глубокой воде.
Конечно, выражение имеет больше информативное значение, чем практическое, т.к. обычно требуется информация об эволюционном периоде циркуляции. Однако, оценив величину изменения радиуса установившейся циркуляции, можно приближенно оценить и степень изменения эволюционного участка циркуляции.
При движении судна в узкости наблюдаются те же явления в поведении судна, что и на мелководье с неограниченной акваторией, только проявляется все это в более резкой форме.


Маневрирование – изменение направления движения судна и его скорости с помощью руля, движителей, подруливающих устройств в целях обеспечения безопасности мореплавания или решения эксплуатационных задач (швартовка, постановка на якорь, проход узкостей и т. п.).
Маневренность определяется такими качествами судна, как скорость, ходкость, управляемость, устойчивость на курсе и поворотливость, а также инерционными характеристиками судна.
Маневренность судна не является постоянной. Изменение ее происходит под влиянием различных факторов (загрузки, крена, дифферента, ветра и т. д.), которые надлежит учитывать судоводителям при управлении судном.
Под ходкостью понимается способность судна преодолевать сопротивление окружающей среды и перемещаться с требуемой скоростью при наименьшей затрате мощности главных машин.
Скорость судна - одна из важнейших характеристик маневренных элементов судна. Скоростью судна считается та скорость, с которой оно перемещается относительно воды.
Управляемость - способность судна двигаться по заданной траектории, т.е. удерживать заданное направление движения или изменять его под действием управляющих устройств. Главными управляющими устройствами на судне являются средства управления рулем, средства управления движителем, средства активного управления. Управляемость объединяет два свойства: устойчивость на курсе и поворотливость.
Устойчивость на курсе - это способность судна сохранять направление прямолинейного движения.
Поворотливость - способность судна изменять направление движения и описывать траекторию заданной кривизны.
Устойчивость на курсе и поворотливость находятся в противоречии друг с другом. Чем более устойчиво прямолинейное движение судна, тем труднее его повернуть, т. е. ухудшается поворотливость. Но с другой стороны, улучшение поворотливости судна затрудняет его движение в постоянном направлении, в этом случае удержание судна на курсе связано с напряженной работой рулевого или авто- рулевого и частой перекладкой руля. При проектировании судов стремятся найти оптимальное сочетание этих свойств.
Управляемость судна в основном определяется взаимным расположением трех точек: центра тяжести (ЦТ), центра приложения всех сил сопротивления движению и центра приложения движущих сил (рис. 1.19).
Если центр тяжести при определенном состоянии загрузки судна остается неподвижным, то центр приложения сил сопротивления не имеет постоянного местоположения. В зависимости от движения судна суммарный вектор сил сопротивления водной и воздушной сред изменяется, и точка его приложения к судну обычно перемещается вдоль диаметральной плоскости.
При поворотах судно разворачивается вокруг вертикальной оси (центра вращения - Р), проходящей через центр сил сопротивления.
Если ЦТ располагается впереди центра сил сопротивления, то судно устойчиво на курсе и наоборот, если ЦТ располагается позади центра сил сопротивления, то судно неустойчиво на курсе и более подвержено рысканию.
Расположение центра приложения движущих сил зависит от режима работы движителей, положения руля, воздействия ветра, течения и т. п. В зависимости от расположения указанных трех точек при движении судна могут произойти сопутствующие явления: крен, дифферент, поперечное смещение.
В результате воздействия обтекающих масс воды и ветра на корпус, винт и руль, даже при спокойном море и слабом ветре, судно не остается постоянно на заданном курсе, а отклоняется от него.
Отклонение судна от курса при прямом положении руля называется рыскливостью . Амплитуда рыскания судна в тихую погоду небольшая. Поэтому для удержания его на курсе требуется незначительная перекладка руля вправо или влево. При сильном ветре и волнении устойчивость судна на курсе значительно ухудшается.
На рыскливость судна большое влияние оказывает расположение надстройки. На тех судах, где надстройки на корме, рыскливость увеличивается, так как почти всегда корма идет «под ветер», а нос - «на ветер». Если надстройка в носу, то судно уклоняется «от ветра».
Уклонение судна под ветер называется увальчивостью . Это свойство так же, как рыскливость, является недостатком судна, его всегда приходится учитывать при осуществлении различных маневров, особенно в стесненных условиях.
Рис. 1.19. Расположение центра вращения судна
Силы и моменты, действующие на судно. Все силы, действующие на судно, разделяются на три группы: движущие, внешние, реактивные.
К движущим силам относятся силы, создаваемые средствами управления: тягой винта, боковой силой руля, силами, создаваемыми средствами активного управления.
К внешним силам относятся силы давления ветра, волнения моря, давления течения (рис. 1.20).
Рис. 1.20. Воздействие внешних сил на корпус судна

К реактивным силам относятся силы, возникающие в результате движения судна под действием движущих и внешних сил. Они разделяются на инерционные − обусловленные инертностью судна и присоединенных масс воды и возникающие только при наличии ускорений. Направление действия инерционных сил всегда противоположно действующему ускорению.
Неинерционные силы обусловлены вязкостью воды и воздуха и являются гидродинамическими и аэродинамическими силами.
Влияние мелководья на управляемость судна проявляется в следующем:
- резко ухудшается устойчивость судна на курсе, повышается рыскливость;
- ухудшается поворотливость судна, значительно уменьшаются углы дрейфа и соответственно увеличивается радиус циркуляции.
Происходит это по следующим причинам. Как уже говорилось, движущееся судно имеет перепад давлений вдоль корпуса. В результате этого уровень воды в средней части пониженный, а в районе форштевня и ахтерштевня – повышенный. Перепад уровней воды в кормовой оконечности приводит к тому, что вода, перетекая от повышенного уровня к пониженному, образует попутный поток, скорость которого зависит от величины перепада уровней воды.
При движении судна на мелководье перепад давлений (и как следствие — уровней воды) увеличивается по мере приближения скорости судна к ее критическому значению Укр.
Вращающий момент, создаваемый пером руля зависит от скорости набегающего потока. Увеличение скорости попутного потока при выходе судна на мелководье снижает скорость набегающего на перо руля потока и, как следствие, снижает эффективность рулевого устройства (рис. 1).
Другим фактором, влияющим на управляемость, является то, что при выходе судна на мелководье для сохранения прежней скорости требуются большие энергетические затраты, чем на глубокой воде. Эта дополнительная энергия расходуется на то, что в процесс волнообразования вовлекаются дополнительные массы воды.
Увеличение инерционности судна при падении эффективности пера руля приводит к ухудшению маневренных и тормозных характеристик судна.
При одинаковой начальной скорости тормозной путь на мелководье и на глубокой воде отличаются незначительно.
При движении судна в узкости наблюдаются те же явления в поведении судна, что и на мелководье с неограниченной акваторией, только проявляется все это в более резкой форме.

Рис. 1 Влияние мелководья на радиус циркуляции
Гидродинамическое взаимодействие расходящихся судов в узкости
При расхождении на небольших траверзных расстояниях двух судов возникает опасная навигационная ситуация. В этом случае возникают дополнительные внешние силы, обусловленные гидродинамическим воздействием корпусов. В результате суда могут потерять управляемость и может произойти их столкновение.
В зависимости от сочетания различных факторов и взаимного положения судов может происходить как «притяжение», так и «отталкивание» судов (рис. 2).

Рис. 2 Расхождение судов в узком канале
При сближении судов на контркурсах под влиянием областей повышенного давления носовые оконечности будут отталкиваться.
Когда форштевни разойдутся, массы воды устремятся в области пониженного давления, увлекая за собой носовые оконечности. Это наиболее опасный момент расхождения, и для предотвращения столкновений суда должны быть одержаны. Когда суда выходят на траверз друг друга, они начинают притягиваться.
Далее все повторится в обратном порядке – кормовые оконечности устремятся в области пониженного давления, а после расхождения оттолкнуться.
Такой же процесс отталкивания и притягивания наблюдается при обгоне (рис. 3). Однако из-за более длительного взаимодействия гидродинамических полей опасность столкновения при обгоне выше. При движении на обгон происходит резкое увеличение просадки обоих судов.

Рис. 3 Гидродинамическое взаимодействие судов при обгоне
Управление и маневрирование судном при плавании в канале
Характеристика каналов
Судоходные каналы классифицируются по назначению, способу устройства, наличию оградительных сооружений, пропускной способности, размерам поперечного сечения и высот надводных переходов, длительности навигационного периода и характеру материковых грунтов, составляющих ложе канала.
По назначению каналы подразделяют на соединительные и подходные;
- по способу устройства — на закрытые (шлюзованные) и открытые;
- по наличию искусственных оградительных сооружений — на огражденные и не огражденные.
По пропускной способности каналы классифицируются показателями фактического судооборота в обоих направлениях, выраженными количеством пропускаемых судов и их регистровым тоннажем. По размерам поперечного сечения и высотам надводных переходов каналы классифицируют по:
- максимально допустимой осадке пропускаемых судов;
- максимально допустимой высоте надводного габарита судов;
- режиму пропуска судов (каналы одностороннего или двустороннего движения).
Каналы двустороннего движения могут иметь достаточную ширину либо по всей длине для расхождения встречных судов в любом пункте, либо иметь уширения в нескольких пунктах для ожидания пропуска встречных судов.

Рис. 4 Движение судна в канале
По длительности навигационного периода каналы подразделяются на незамерзающие с круглогодичным навигационным периодом и замерзающие с ограниченным навигационным периодом по ледовым условиям.
Влияние рельефа канала на управляемость судна
Движение судна в мелководном канале сопровождается теми же явлениями, что и на мелководье, но выраженными в более резкой форме (рис. 5). Из-за дополнительного стеснения фарватера интенсивность волнообразования, просадки и сопротивления движению нарастают быстрее, чем на неограниченном мелководном участке моря. Особенности движения судна в канале различаются в зависимости от скорости движения. При движении судна с докритической скоростью в сечении канала, стесненном корпусом, скорость течения жидкости между бортом судна и стенкой канала увеличивается, а уровень ее поверхности понижается. При смещении с оси канала обтекание корпуса становится несимметричным, скорость потока воды между бортом и ближайшей стенкой увеличивается и возникает поперечная сила, которая притягивает судно к ближайшей стенке.
Явление притягивания особенно заметно при отходе судна от стенки канала. В начале движения винт, работающий вперед, интенсивно засасывает воду со стороны носовой части судна. Поскольку приток воды со стороны ближайшего к стенке борта затруднен, уровень воды между бортом и ближайшей стенкой понижается и возникает сила, притягивающая судно к стенке канала.
Более сложными являются взаимодействие корпуса и стенок канала при движении судна околокритическими скоростями (рис. 6). С началом образования одиночной волны изменяется профиль поверхности воды, обтекающей корпус. При смещении с оси канала со стороны ближайшей стенки в носовой части судна уровень поверхности воды повышается и возникает избыточное давление, отталкивающее скулу от ближайшей стенки. Одновременно ускоряется поток воды между бортом и ближайшей стенкой, достигая максимальной скорости в корме судна за счет винтовой струи, что приводит к понижению уровня воды, и корма судна стремится притянуться к ближайшей стенке.
Рис. 5 Эффект берега при плавании судна в канале Рис. 6 Взаимодействие корпуса судна и стенок канала
Для компенсации возникающего момента и удержания судна на прямом курсе в этом случае необходимы несимметричные, смещенные в сторону ближайшей стенки канала перекладки руля. Во время прохода мимо расширений или ответвлений канала, из-за нарушения симметричности обтекания корпуса, носовая оконечность судна будет уклоняться в сторону расширений или ответвлений. Если в это время в расширении стоит какое-либо судно, то это грозит навалом. Средство предупреждения – заранее переложить руль в сторону противоположную расширению.
При прохождении прямолинейных участков, поскольку профиль сечения канала редко бывает симметричным, нос судна будет уклоняться в сторону больших глубин (рис. 7). Это явление называется «эффектом свободной воды». При следовании судна вдоль отлогого берега этот эффект резко усиливается (рис. 8).
Рассмотренные ранее явления существенно усиливаются при увеличении скорости судна, что приводит к его резким отклонениям от курса, которые иногда невозможно компенсировать только перекладкой руля. Первым признаком несоответствия скорости движения судна площади сечения канала является ярко выраженная крутая кормовая волна. Если не уменьшить скорость судна, то при неожиданном уменьшении площади сечения канала увеличивается интенсивность процесса волнообразования, существенно возрастет сопротивление движению, и судно резко потеряет скорость. Тогда кормовая волна нагонит судно и вызовет его отклонение в ту или иную сторону, т. е. судно потеряет управляемость.
Рис. 7 Влияние расширения канала на управляемость судна Рис. 8 Влияние рельефа дна канала на отклонение носа судна
Влияние течения на управляемость судна в канале

Рис. 9 Влияние встречного течения на управляемость судна
Попутное течение. Скорость относительно воды меньше, чем скорость такого же судна, но идущего против течения. Если судно запоздало положит руль вправо, то его развернет поперек канала (рис. 10). Это произойдет из-за сужения сечения в районе правого борта, вследствие чего скорость течения увеличится, давление между бровкой канала и корпусом уменьшится и начнется притяжение кормы к правому берегу. Однако это явление будет значительно меньше влиять на судно, так как скорость в зазоре значительно меньше, чем при встречном течении. Кроме того, струи воды будут ударять в левый борт и препятствовать повороту влево. Судно будет лучше слушаться руля, и может быть легко выведено на ось канала.

Рис. 10 Влияние попутного течения на управляемость судна
Поворот судна в канале
Выполнение поворота в узкости является наиболее ответственным моментом. Точка начала поворота должна быть нанесена на карту с учетом действия течения, радиуса циркуляции при определенной перекладке руля и фиксироваться методом обсервации.
При выполнении поворота на течении необходимо учитывать, что даже кратковременное положение судна под значительным углом относительно направления течения создает угрозу сноса его в сторону берега. Судно должно вписаться в поворот так, чтобы его диаметральная плоскость была параллельна близлежащему берегу.
При выполнении поворота следует избегать резкой перекладки руля в крайние положения: необходимо учитывать возможность заклинивания руля. На крутых поворотах можно ускорить поворот кратковременным увеличением скорости. Поэтому поворот всегда следует делать на умеренной скорости с тем, чтобы был резерв хода для улучшения поворотливости судна.
При отклонении по оси узкости, канала и при приближении к берегу сопротивление движению судна возрастает – возникает поперечная сила, которая отталкивает носовую часть судна и притягивает кормовую к ближнему берегу, причем, чем ближе судно будет находиться к одному из берегов, тем больше возмущение воды и скорость потока между берегом и бортом судна и тем больше силы отталкивания и притяжения, что может привести к развороту судна поперек узкости (рис. 11).
При движении судна с неработающими машинами эффект берега практически не ощутим. При работе машины ходом назад эффект берега противоположен – притягивается носовая часть судна, отталкивается – кормовая.

Рис. 11 Поворот в узкости
Особенности расхождения судов в канале
Расхождение судов друг с другом в каналах сопровождается не только гидродинамическим взаимодействием между судами, но и каждым судном с дном водоема и ближайшим берегом. Смещение при расхождении с оси канала вызывает действие гидродинамических сил, которые стремятся развернуть судно поперек канала. Чтобы удержать его на курсе, требуются своевременные действия рулем.
Расхождение в узком канале. Два судна сближаются, придерживаясь оси канала (рис. 12). Скорость судна заблаговременно уменьшают до минимальной, достаточной для управления. Когда до встречного судна остается расстояние, равное 2—3 длинам корпуса, оба судна энергично кладут руль вправо и выходят ближе к кромке канала. Приближаться к кромке канала заранее, на большом расстоянии между судами нельзя, так как удерживать судно вплотную к бровке длительное время трудно. В тот момент, когда форштевни судов поравняются, руль перекладывают влево, чтобы отвести корму и начать движение вдоль встречного судна, одновременно увеличивая частоту вращения гребного винта. Суда огибают друг друга, совершая плавный поворот влево. Когда носовая часть подходит к траверзу миделя другого судна, руль перекладывают вправо, чтобы воспрепятствовать движению кормы к кромке канала. Благодаря взаимодействию гидродинамических сил между судами и каждого судна с берегом оба судна стремятся развернуться влево. Судоводителям следует контролировать движение судов, но не препятствовать их плавному развороту влево. Как только оба судна разойдутся чисто, они снова выйдут на ось канала. Движению необходимо помогать рулем и при выходе на ось канала задержать судно на заданном курсе.
Если одно из судов во время расхождения задержит движение влево и после прохождения другого судна останется у правой бровки канала, то влияние берегового эффекта (отталкивание носа и притягивание кормы) может резко уклонить его влево и даже развернуть поперек канала. Чтобы не допустить разворота влево необходимо своевременно одержать судно рулем вплоть до перекладки руля право на борт и помогать работой машины до тех пор, пока судно не выйдет на ось канала.

Рис. 12 Расхождение судов в узкости
В случае расхождения в узком канале или фарватере последовательно с несколькими судами эти суда должны заблаговременно установить и сохранить между собой интервал не менее 1 — 1,5 мили, чтобы дать возможность встречному судну занять устойчивое положение на оси канала после расхождения с предыдущим судном.
Обгон в узкости. С целью обеспечения безопасности плавания на наиболее тяжелых участках местными правилами обычно вводится запрет на обгоны. Однако в случае, если какое-либо судно пойдет на обгон в опасной близости, необходимо принять меры предосторожности: в первую очередь уменьшить ход до минимально возможного, затем выполнять действия, способствующие безопасному обгону.
Разворот судна в узкости
В практике плавания в узкостях бывают случаи, когда необходимо развернуть судно на обратный курс. Такой маневр одновинтового судна с правым шагом винта осуществляют следующим образом (рис. 13). Наибольшая скорость поворота наблюдается тогда, когда машине дан полный ход вперед и руль положен на правый борт. Струя воды от винта, действующая на руль, будет отклонять корму влево. С увеличением хода поворот кормы влево будет происходить быстрее. Как только нос судна начнет уклоняться вправо, дают машине полный ход назад и перекладывают руль сначала прямо, а затем, по мере увеличения оборотов винта, влево. С увеличением хода назад отклонение кормы влево будет увеличиваться действием руля. Когда судно начнет двигаться назад, снова перекладывают руль вправо и дают машине полный ход вперед. Маневрируя таким образом, разворачиваются в нужном направлении. Во многих случаях в узкостях, прежде чем начать разворот, следует погасить излишнюю инерцию, для чего заранее уменьшают ход. Нужно помнить, что диаметр циркуляции бывает наименьшим при малой начальной скорости судна, но при работающей полным ходом машине и положенном на борт руле.

Рис. 13 Разворот судна в узкости
Разворот на обратный курс можно осуществить с помощью якоря, для чего в определенном месте отдают якорь, потравливают якорь-цепь с таким расчетом, чтобы при данной глубине на малом ходу он держал (рис. 14).
Положив руль на борт в сторону отданного якоря, постепенно увеличивают обороты винта и двигаются вокруг якоря на туго натянутой цепи.
Нельзя отдавать якорь там, где находятся цепи якорей других судов, мертвых якорей швартовных бочек, подводные телефонные и электрические кабели.
Маневры необходимо выполнять на малой скорости, а выходить на якорь-цепь — постепенно, исключая чрезмерные ее напряжения.

Рис. 14 Разворот судна при помощи якоря
Меры предосторожности при проходе мимо ошвартованных в канале судов
При проходе мимо ошвартованных судов необходимо держаться оси канала. Уклоняться к противоположному берегу не следует, т. к. отталкивание носа от стенки канала может вызвать резкий поворот в сторону ошвартованного судна. Скорость движения должна быть минимально возможной, а в некоторых случаях проходить мимо ошвартованных судов следует по инерции с остановленными машинами, чтобы уменьшить на них влияние судовых волн. При чрезмерной скорости судовые волны могут вызвать резкие продольные и поперечные перемещения ошвартованного судна, что может привести к обрыву швартовых и возникновению аварийной ситуации (рис. 15).

Рис. 15 Ошвартованное судно в канале
Общие рекомендации при плавании судна в канале и узкости
Общие рекомендации при плавании на мелководье и узкостях сводятся к следующему.
Автор статьи

Читайте также:
- 546 пп о предоставлении государственных и муниципальных услуг
- Правовые нормы в отличие от других социальных норм распространяются только на граждан государства
- Какому понятию соответствует данное определение система органов государственной власти осуществляет
- Административный регламент роспотребнадзора по предоставлению государственной услуги
- Эксперт может привлекаться в конституционный судебный процесс на стадии