
Что бывает пассивным и активным на судах
Обновлено: 26.04.2024
При управлении судном на акватории портов, рейдов, в узкостях, при расхождении судов в море, а также в аварийных ситуациях возникает необходимость изменения скорости судна. Изменение скорости морского судна, обладающего большой массой, происходит главным образом под воздействием двух сил: силы упора (тяги) движителя и силы сопротивления воды. При этом масса судна при его ускорении (положительном или отрицательном) порождает силу инерции, всегда препятствующую изменению скорости движения.
Способность судна изменять скорость своего движения во времени под совместным влиянием перечисленных сил при различных начальных условиях принято называть инерционно-тормозными характеристиками (ИТХ).
Движение судна в процессе изменения скорости описывается первым уравнением системы. При отсутствии ветра и прямом положении руля, когда сила Ах и Ррх несущественны, для случая прямолинейного движения:
где mx — масса судна с учетом присоединенной массы воды при движении по оси X (mx = m+λ11), кг;
R — сила сопротивления воды, Н;
Ре — сила упора винта (винтов), Н.
Знак «—» перед силой сопротивления указывает, что эта сила всегда направлена против движения, знак «-+-» перед силой упора винта означает, что упор направлен вперед, а знак «—» — назад.
Произведение массы на ускорение представляет собой силу инерции. При торможении ускорение имеет отрицательный знак.
Присоединенная масса воды при движении по оси X обычно принимается равной 10% массы судна (λ11≈ 0,1m).
При этом условии масса судна с учетом присоединенной массы воды рассчитывается по формуле
где Δ—водоизмещение судна, т.
Сила сопротивления воды пропорциональна квадрату скорости, т. е.
R = kV 2 , (6.4)
где k — коэффициент пропорциональности(сопротивления),кг/м;
V — скорость судна, м/с.
Сила сопротивления воды
где ζ — безразмерный гидродинамический коэффициент полного сопротивления, зависящий от формы (обводов) корпуса и состояния его поверхности (шероховатости);
р — массовая плотность воды (для морской воды средней солености можно принимать р~ 1020 кг/м 3 );
Ώ— площадь смоченной поверхности корпуса, м 3 .
Из сопоставления формул ясно, что
т. е. коэффициент k зависит не только от формы и состояния поверхности корпуса, но и от его размеров, характеризуемых площадью смоченной поверхности, поэтому для каждого судна значение коэффициента k изменяется с изменением осадки.
Сила упора винта зависит от диаметра DB, шагового отношения H/DB, дискового отношения Θ, числа лопастей Z, частоты вращения n, также от взаимодействия винта с корпусом судна.
Для изменения скорости движения судна приходится изменять частоту вращения винта (винтов), а иногда и изменять направление вращения. т.е. выполнять реверсирование. Способ выполнения этих операций зависит от типа комплекса двигатель – движитель.
На всех судах устанавливаются определенные дискретные режимы двигателя (двигателей) для работы передним и задним ходом, которые по установившейся традиции, имеют следующие названия: самый малый ход, малый ход, средний ход, полный маневренный ход, полный ход. В конце каждого из указанных названий добавляется слово «вперед» или «назад». В дальнейшем для обозначения режимов будем пользоваться для краткости сокращениями: СМХП, МХП, СХП, ПХПм, ПХП, а также СМХЗ, МХЗ и т. Для каждого из перечисленных режимов устанавливается частота вращения винта. При этом для ПХП частота вращения соответствует мощности главного двигателя, обеспечивающей движение судна с эксплуатационной плановой скоростью. Поскольку коэффициент сопротивления воды зависит от осадки судна, то для реализации мощности двигателя в грузу и в балласте устанавливаются обычно разные значения частоты вращения: в балласте частота вращения винта и соответствующая ей эксплуатационная скорость судна несколько выше, чем в грузу.
Градация ходов.
Самый малый передний ход (Dead slow ahead) – минимальные устойчивые обороты, при которых двигатель не глохнет (≈ 25% ППХ).
Малый передний ход (Slow ahead) – обороты двигателя, устанавливаемые после диапазона критических оборотов, и соответствующая им скорость хода судна (≈ 50% ППХ).

Рис. 6.3. Телеграф
Средний передний ход (Half ahead) – обороты двигателя, при которых обеспечивается половина мощности двигателя (подача топлива на середине), и соответствующая им скорость хода (≈ 75% ППХ).
Полный передний маневренный ход (Full manoeuvring ahead) – полные обороты двигателя при работе на легком топливе (дизельное топливо) в маневренном режиме (≈ 90% ППХ).
Полный передний ход ходового режима (Full ahead for sea) – номинальные (расчетные) полные обороты двигателя при работе на тяжелом топливе – мазут (наиболее благоприятный режим работы), при которых двигатель может работать «вечно» при должном техническом обслуживании, и соответствующая им скорость хода.
Самый полный передний ход (Emergency full ahead or Full ahead overall) – кратковременный режим работы двигателя, который может быть применен в практике управления судном только в аварийных ситуациях.
Градация ходов на задний ход аналогична переднему, только передний (ahead)необходимо заменить на задний (astern).
Винт рассчитан только для работы на передний ход, поэтому характеристики заднего хода отличаются от переднего. Упор заднего хода не менее чем на 10% меньше переднего, а у дизельных двигателей мощность заднего хода может достигать 60% переднего. На судах с турбиной имеются специальные турбины заднего хода, но и их мощность меньше на 30–40% турбины переднего хода.
Примерная зависимость между частотами вращения винта и соответствующими им скоростями судна выражается формулой
Эта формула позволяет приближенно определить скорость судна, соответствующую заданной частоте вращения винта, если известна скорость при какой-то другой частоте вращения.
Процесс движения судна после изменения частоты вращения работающего передним ходом двигателя описывается дифференциальным уравнением (6.2) которое для данного случая и (6.4) с учетом подстановки приобретает вид
где Ре — текущее значение силы упора винта на переднем ходу, Н.
Как показывает анализ модельных и натурных экспериментов, полезная сила упора винта на переднем ходу при изменении режима двигателя быстро приобретает значение, соответствующее этому новому режиму, после чего изменяется мало, т. е. остается близкой к постоянному значению в процессе изменения скорости судна. Сказанное позволяет сделать допущение, что полезная сила упора винта на переднем ходу в переходном процессе изменения скорости судна остается постоянной, т. е.

Когда переходный процесс изменения скорости заканчивается, т. е. скорость приобретает установившееся значение (V=VУСТ), ускорение
(или замедление) судна становится равным нулю ( ) Следовательно, уравнение (6.7) для этого предельного случая приобретает вид
а так как Ре в процессе изменения скорости принята постоянной (6.9), то дифференциальное уравнение (6.8) можно записать в виде:
где Vуст — значение установившейся скорости для используемого режима двигателя, м/с;
V — текущее значение скорости, м/с.
Если в конкретном случае V< VУСТ, то уравнение (6.11) описывает процесс увеличения скорости судна. Если же V>Vуст, то происходит снижение скорости.
После разделения переменных
Время изменения скорости от V1 до V2 выражается определенным интегралом в соответствующих пределах
Теперь, если учесть, что то после подстановки этого выражения в уравнение (7.10) и разделения переменных получим определенный интеграл, выражающий путь судна в процессе изменения скорости oт V1 до V2
После интегрирования выражений (6.12) и (6.13) получим формулы соответственно для времени в секундах и пути в метрах при изменении скорости судна от V1 до V2 1, V2 и VУСТ выражаются в м/с, тх — в кг, k — в кг/м):
Следует отметить, что формулы (6.14) и (6.15) позволяют получить конечные решения, когда V2 имеет любое значение между значениями V1 и VУСТ, но не равное VУСТ или нулю.

Рис. 6.4. Инерционные характеристики судна при разгоне
Торможение судна.Тормозные характеристики судна, под которыми подразумеваются время и путь торможения в зависимости от начальной скорости, имеют важное значение для обеспечения безопасности мореплавания.
Торможение бывает пассивным и активным.
Пассивное торможение выполняется при остановленном двигателе только за счет сопротивления воды.
Активное торможение обеспечивается за счет реверсирования главного двигателя, после чего создается сила упора винта назад.
Реверс главного двигателя не может быть выполнен мгновенно, поэтому активному торможению всегда предшествует участок пассивного.
В общем случае процесс торможения принято делить на три периода.
Первый период — прохождение команды продолжается от момента подачи команды по машинному телеграфу до момента закрытия топлива на ДВС, пара на ТЗА или выключения питания ГЭД. Первый период длится недолго, примерно 5 с.
Второй период — пассивное торможение длится с момента прекращения подачи топлива (пара) на двигатель до момента реверса.
Третий период—активное торможение длится с момента реверса до момента полной остановки судна или снижения скорости до какого-то заданного значения.
Полное время Т и полный тормозной путь S определяются как суммы соответствующих элементов по трем периодам:
На судах с ВРШ началом третьего периода можно считать момент прохождения лопастями нулевого положения.
Процесс торможения судна на основании (6.1) с учетом (6.8) описывается дифференциальным уравнением вида
Решения записанного в общем виде уравнения (6.17) относительно времени и пути торможения зависят от конкретного вида зависимости для силы упора винта Ре, которое должно быть подставлено в это уравнение. Будем считать полезную силу упора в процессе торможения постоянной величиной, численно равной значению силы упора в режиме на швартовах, т. е.
Ре = Ршв = const. (6.18)
Коэффициент k с учетом квадратичной зависимости силы сопротивления от скорости определяется выражением:
где Vo — исходное значение скорости, м/с;
Ro — полная сила сопротивления воды при скорости Vo, H.
Подстановка (6.18) и (6.19) в дифференциальное уравнение (6.17) дает
После разделения переменных получается выражение для времени активного торможения от начальной скорости Vн до текущей V:
а после подстановки получим соответствующее выражение для тормозного пути
В результате интегрирования выражений (6.21) и (6.22) получены рабочие формулы для расчета времени и пути торможения (время, сек; путь, м):
для пассивного торможения (РШВ = 0):

Рис. 6.5. Инерционные характеристики судна при пассивном торможении
Под тормозными характеристиками подразумеваются время и путь торможения в зависимости от величины начальной скорости и водоизмещения судна. Торможение бывает пассивным и активным.
Пассивное торможение выполняется при остановленном двигателе, только за счет сопротивления воды движению судна.
Активное торможение обеспечивается за счет реверсирования и создания упора гребного винта на задний ход.
Реверс главного двигателя не может быть выполнен мгновенно, поэтому активному торможению всегда предшествует участок пассивного. Длительность периодов активного и пассивного торможения зависит от типа пропульсивного комплекса двигатель — движитель. В качестве главных двигателей наиболее часто используют: двигатели внутренего сгорания (ДВС), турбозубчатые агрегаты (ТЗА) и гребные электродвигатели (ГЭД). В качестве движителей используются: винты фиксированного шага (ВФШ) и винты регулируемого шага, которые образуют пропулъсивные комплексы: ДВС - ВФШ, ТЗА - ВФШ, ГЭД - ВФШ, а также любой двигатель — ВРШ.
Реверсивние ДВС - ВРШ.
На большинстве теплоходов установлены низкооборотные ДВС, напрямую связанные с гребным валом. Для выполнения реверса сначала закрывается подача топлива на ДВС. Когда обороты снизятся, из пусковых баллонов в цилиндры подается сжатый воздух, который проворачивает двигатель в обратном направлении, после этого впрыскивается топливо и происходит запуск двигателя на топливе.
Для этого комплекса характерен замедленный реверс при торможении с полного переднего хода. Это объясняется тем, что давление контрвоздуха обычно недостаточно для преодоления момента, приложенного к винту со стороны набегающего потока воды и работающего в режиме гидротурбины. Для уверенного запуска ДВС необходимо, чтобы обороты винта, вращающегося в режиме гидротурбины, снизились до значения 25 - 35% от оборотов полного переднего хода, что будет соответствовать 60 - 70% снижению скорости судна от полного переднего хода. При этом судно длительное время движется по инерции.
Если же торможение выполняется при пониженной скорости, то реверс выполняется быстро за 10 - 15 с и путь торможения резко сокращается.
Реверсирование ТЗА - ВФШ
Для реверсирования на турбоходах используется турбина заднего хода, мощность которой составляет примерно 50% от мощности турбины переднего хода. Обе турбины имеют общий вал.
Для выполнения реверса, сначала перекрывают пар на турбину переднего хода, затем открывают пар на сопла турбины заднего хода. Поскольку ротор турбины вращается с высокой частотой (несколько тысяч об/мин.), то его остановка с помощью турбины заднего хода не может быть выполнена мгновенно. Тем не менее, реверс турбины с полного переднего хода выполняется быстрее, чем на теплоходах, однако упор винта на задний ход у них невелик. Поэтому, при малых скоростях тормозные характеристики турбоходов значительно хуже, чем на теплоходах.
Реверсирование ГЭД - ВФШ
Существуют различные типы электроприводов на постоянном и переменном токе.
Судовые энергетические установки обычно состоят из нескольких дизель - или турбогенераторов, питающие гребные электродвигатели, что позволяет оперативно варьировать мощностями, в зависимости от условий работы судна, например, на многовинтовых ледоколах. Реверсирование электродвигателей осуществляется коммутированием питающего напряжения. Тормозные характеристики электроходов несколько лучше, чем у теплоходов.
Изменение направления упора ВРШ происходит в результате поворота лопастей винта без изменения направления вращения двигателя и без снижения частоты вращения. Скорость реверсирования ВРШ зависит от скорости срабатывания привода поворота лопастей. Приводы современных ВРШ позволяют изменить шаг винта с полного переднего на полный задний ход за 5 - 10 с, что обеспечивает резкое уменьшение тормозного пути и времени. Суда, оборудованные ВРШ с такими приводами, обладают наилучшими реверсивными характеристиками.
В общем случае процесс торможения принято делить на три периода. Первый период - прохождение команды до момента закрытия топлива на ДВС, пара на ТЗА или выключения литания на ГЭД. Он составляет примерно 5 с. Второй период - пассивное торможение длится с момент прекращения подачи топлива (пара) на двигатель, до момента реверса.
Третий период - активное торможение длится с момента реверса до момента полной остановки судна или снижения скорости до заданного значения.
Под тормозными характеристиками подразумеваются время и путь торможения в зависимости от величины начальной скорости и водоизмещения судна. Торможение бывает пассивным и активным.
Пассивное торможение выполняется при остановленном двигателе, только за счет сопротивления воды движению судна.
Активное торможение обеспечивается за счет реверсирования и создания упора гребного винта на задний ход.
Реверс главного двигателя не может быть выполнен мгновенно, поэтому активному торможению всегда предшествует участок пассивного. Длительность периодов активного и пассивного торможения зависит от типа пропульсивного комплекса двигатель — движитель. В качестве главных двигателей наиболее часто используют: двигатели внутренего сгорания (ДВС), турбозубчатые агрегаты (ТЗА) и гребные электродвигатели (ГЭД). В качестве движителей используются: винты фиксированного шага (ВФШ) и винты регулируемого шага, которые образуют пропулъсивные комплексы: ДВС - ВФШ, ТЗА - ВФШ, ГЭД - ВФШ, а также любой двигатель — ВРШ.
Реверсивние ДВС - ВРШ.
На большинстве теплоходов установлены низкооборотные ДВС, напрямую связанные с гребным валом. Для выполнения реверса сначала закрывается подача топлива на ДВС. Когда обороты снизятся, из пусковых баллонов в цилиндры подается сжатый воздух, который проворачивает двигатель в обратном направлении, после этого впрыскивается топливо и происходит запуск двигателя на топливе.
Для этого комплекса характерен замедленный реверс при торможении с полного переднего хода. Это объясняется тем, что давление контрвоздуха обычно недостаточно для преодоления момента, приложенного к винту со стороны набегающего потока воды и работающего в режиме гидротурбины. Для уверенного запуска ДВС необходимо, чтобы обороты винта, вращающегося в режиме гидротурбины, снизились до значения 25 - 35% от оборотов полного переднего хода, что будет соответствовать 60 - 70% снижению скорости судна от полного переднего хода. При этом судно длительное время движется по инерции.
Если же торможение выполняется при пониженной скорости, то реверс выполняется быстро за 10 - 15 с и путь торможения резко сокращается.
Реверсирование ТЗА - ВФШ
Для реверсирования на турбоходах используется турбина заднего хода, мощность которой составляет примерно 50% от мощности турбины переднего хода. Обе турбины имеют общий вал.
Для выполнения реверса, сначала перекрывают пар на турбину переднего хода, затем открывают пар на сопла турбины заднего хода. Поскольку ротор турбины вращается с высокой частотой (несколько тысяч об/мин.), то его остановка с помощью турбины заднего хода не может быть выполнена мгновенно. Тем не менее, реверс турбины с полного переднего хода выполняется быстрее, чем на теплоходах, однако упор винта на задний ход у них невелик. Поэтому, при малых скоростях тормозные характеристики турбоходов значительно хуже, чем на теплоходах.
Реверсирование ГЭД - ВФШ
Существуют различные типы электроприводов на постоянном и переменном токе.
Судовые энергетические установки обычно состоят из нескольких дизель - или турбогенераторов, питающие гребные электродвигатели, что позволяет оперативно варьировать мощностями, в зависимости от условий работы судна, например, на многовинтовых ледоколах. Реверсирование электродвигателей осуществляется коммутированием питающего напряжения. Тормозные характеристики электроходов несколько лучше, чем у теплоходов.
Изменение направления упора ВРШ происходит в результате поворота лопастей винта без изменения направления вращения двигателя и без снижения частоты вращения. Скорость реверсирования ВРШ зависит от скорости срабатывания привода поворота лопастей. Приводы современных ВРШ позволяют изменить шаг винта с полного переднего на полный задний ход за 5 - 10 с, что обеспечивает резкое уменьшение тормозного пути и времени. Суда, оборудованные ВРШ с такими приводами, обладают наилучшими реверсивными характеристиками.
В общем случае процесс торможения принято делить на три периода. Первый период - прохождение команды до момента закрытия топлива на ДВС, пара на ТЗА или выключения литания на ГЭД. Он составляет примерно 5 с. Второй период - пассивное торможение длится с момент прекращения подачи топлива (пара) на двигатель, до момента реверса.
Третий период - активное торможение длится с момента реверса до момента полной остановки судна или снижения скорости до заданного значения.
Способы полета на или от радиостанции. Как показано ранее, КУР не является навигационным параметром, поскольку в одной и той же точке пространства может иметь любое значение в зависимости от направления продольной оси ВС. Поэтому с помощью одного только КУР нельзя определить МС. Но можно решать некоторые другие навигационные задачи, например, выполнить полет по ЛЗП. Для этого радиостанция должна находиться на ЛЗП, например, в начальном или конечном ППМ участка маршрута. Но она также может находиться на продолжении ЛЗП, то есть за пределами участка.
Во внеаэродромном воздушном пространстве (на воздушных трассах) ОПРС как раз и располагают в ППМ, чтобы облегчить экипажу выдерживание ЛЗП. Традиционно рассматривают три «классических» способа полета по ЛЗП с помощью радиокомпаса: пассивный, курсовой и активный способы.
Пассивный полет на радиостанцию. Такой способ полета является самым простым и по сути не требует наличия на борту никакого навигационного оборудования, кроме АРК. Способ пассивного полета на радиостанцию заключается в непрерывном выдерживании КУР равным нулю (КУР=0). Это означает, что продольная ось ВС на протяжении всего полета направлена на радиостанцию.
На первый взгляд кажется очевидным, что если ВС в начальный момент находилось на ЛЗП, то в этом случае оно и будет лететь по ЛЗП прямо на радиостанцию. Так и было бы, но только при абсолютно точном измерении и выдерживании КУР и, самое главное, при отсутствии ветра. Ведь при наличии ветра ВС не летит в том направлении, куда направлена его продольная ось. Имеется угол сноса.
Пусть в начальный момент времени ВС находится точно на ЛЗП, проходящей через радиостанцию, на расстоянии S0 от нее, а продольная ось ВС направлена точно на радиостанцию (КУР=0), рис. 3.14.
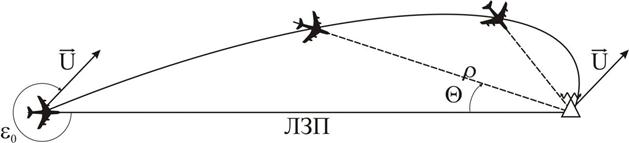
Рис. 3.14. Пассивный полет на радиостанцию
Пусть ветер дует под углом ε0 к ЛЗП. Как только начнется полет, ветер снесет ВС с ЛЗП и будет относить его все дальше и дальше. Направление на радиостанцию будет изменяться, но пилот выдерживает КУР=0, меняя курс и непрерывно направляя продольную ось ВС на радиостанцию. В результате ВС полетит по сложной кривой, называемой радиодромией.
Анализируя уравнение радиодромии, можно сделать несколько полезных для практики выводов.
1) Радиодромия является кривой линией, причем, переменной кривизны. Чтобы выполнить по ней полет, ВС все время должно находится в развороте и, следовательно, выполнять полет с креном. Если в начале полета кривизна кривой и крен невелики, то по мере приближения к радиостанции, пилоту необходимо все больше увеличивать крен, чтобы удерживать «убегающую» стрелку АРК на нуле.
2) Теоретически, строго выполняя полет по радиодромии, ВС в конце концов выйдет на радиостанцию, причем с направления, противоположного направлению ветра. То есть, если, например, ветер дует перпендикулярно ЛЗП, то и ВС выйдет на радиостанцию поперек ЛЗП. На практике же ВС вряд ли сможет выйти точно на радиостанцию, поскольку вблизи нее кривизна радиодромии будет столь велика, что потребует выдерживания слишком большого крена. А ведь у всех гражданских ВС существует максимальный крен, который нельзя превышать (обычно 30º). После его достижения пилот уже не сможет удерживать КУР=0 и ВС «проскочит» мимо радиостанции.
3) За исключением случаев строго попутного или встречного ветра ВС будет уклоняться от ЛЗП и даже может выйти за пределы ширины воздушной трассы. Максимальное уклонение z, которое возможно при конкретных U и V и боковом ветре, можно рассчитать по приближенной формуле

Интересно, что такое максимальное уклонение будет иметь место не при строго боковом ветре (ε=90º), а в зависимости от величины n при ε равном от 90º …105 º (чем больше n, тем ближе к 90º).
Например, при V=500 км/ч, U=100 км/ч (n=5) и S0=150 максимальное уклонение будет иметь место при угле ветра примерно 102º и составит z=11 км, то есть ВС окажется далеко за пределами трассы.
По сравнению с полетом по кратчайшему расстоянию радиодромия имеет большую протяженность, полет по ней требует несколько большего времени, что влечет перерасход топлива. Правда, увеличение длины ЛФП не является столь уж значительным (не более 5-7%).
По изложенным причинам пассивный полет на радиостанцию хотя и является простым по своей идее, но в большинстве случаев малоприемлем в гражданской авиации, поскольку приводит к уклонению от ЛЗП и выходу на радиостанцию не в том направлении, в котором нужно продолжать полет. Однако его в принципе можно применять, когда ветер близок к попутному или встречному.
Разумеется, пассивный полет можно применять в экстренных ситуациях, когда точность навигации не играет большой роли. Например, для выхода на аэродром при потере ориентировки или в сложных метеоусловиях.
Курсовой способ полета на радиостанцию.
Курсовой способ является более удобной для пилота модификацией пассивного способа. Он заключается в том, что ВС удерживается на КУР=0 не непрерывно, как в пассивном способе, а устанавливается на этот КУР периодически, время от времени. Довернув ВС на КУР=0, пилот запоминает и выдерживает по компасу получившийся при этом курс. По мере полета с постоянным курсом КУР постепенно уходит от нулевого значения и через некоторое время (обычно через каждые 3-5 минут полета) пилот вновь доворачивает ВС на КУР=0.
На каждом участке полета между доворотами ВС летит с постоянным курсом, то есть прямолинейно, поэтому ЛФП имеет вид ломаной линии. Нетрудно сообразить, что она будет лежать дальше от ЛЗП, чем радиодромия, то есть уклонение будет еще больше. Сохраняются и другие недостатки пассивного способа. Такой способ просто более удобен для пилота, поскольку выдерживать постоянным курс, а не КУР, гораздо легче. Можно даже использовать автопилот.
Активный полет на и от радиостанции. Заключается в выдерживании курсового угла радиостанции с учетом угла сноса.
Чтобы ВС не сносило ветром с ЛЗП, продольную ось нужно отвернуть от ЛЗП в ту сторону, откуда дует ветер, на величину угла сноса.
Если выполняется полет на радиостанцию, а снос положительный (сносит вправо), то продольную ось нужно отвернуть влево, то есть уменьшить курс. При этом КУР будет численно равен УС. Если сносит влево (УС отрицательный), то курс нужно увеличить по сравнению с направлением на радиостанцию (отвернуть продольную ось вправо). При этом КУР уменьшится по сравнению с первоначальным нулевым значение. Но КУР не может быть отрицательным, его отсчитывают в диапазоне от 0 до 360º. Поэтому КУР=360+УС. Например, если УС=-5, то необходимо выдерживать КУР=360+ (-5)=355.
При полете на радиостанцию формулой: КУР=360+УС
При полете от радиостанции используют формулу: КУР=180+УС.
Для использования данного способа не нужно даже знать курс, но, разумеется, необходимо знать УС.
Пассивные успокоители.К числу пассивных успокоителей качки относятся скуловые кили и пассивные успокоительные цистерны .

Скуловые кили являются наиболее простым и эффективным средством умерения бортовой качки и потому находят самое широкое применение. стабилизирующее действие скуловых килей обусловлено ростом демпфирующего момента, создаваемого дополнительными силами сопротивления качке, которые наиболее ощутимы при резонансе. Кроме того, при качке на килях правого и левого бортов, как на крыльях, возникают подъемные силы противоположного направления, создающие дополнительный стабилизирующий момент.
В конструктивном отношении скуловые кили (Рис.51) представляют собой пластины, установленные вдоль судна в районе скулы. Кили располагают так, чтобы они не выходили за габариты судна. Суммарная площадь килей на обоих бортах составляет от 3% до 6% произведения LB. Эффективность бортовых килей в большой степени зависит от удачно выбранного отношения их ширины к протяженности. Ширина Рис.51 Скуловые кили. килей колеблется в пределах от 200 до 1200 мм. В среднем
отношение ширины килей к ширине судна составляет 0,03 – 0,05, а их длина к длине судна – 0,25 – 0,60. Установка килей большей площади приводит к уменьшению амплитуды резонансной качки на 45 – 50%. В условиях нерегулярного волнения бортовые кили нормальной площади уменьшают амплитуду бортовой качки в среднем на 20 – 30%.

Пассивные успокоительные цистерны. Пассивные успокоительные цистерны могут быть двух типов: закрытого, не сообщающегося с забортной водой (цистерны первого рода) (Рис. 52а), и открытого, сообщающегося с забортной водой (цистерны второго рода) (Рис. 52б). Они представляют собой две плоские бортовые цистерны, расположенные поперек судна. Цистерны на половину заполнены водой (у цистерн 1 рода – иногда топливом) и соединены каналами. Цистерны 1 рода имеют два канала – водяной (внизу) и воздушный (вверху). снабженный клапаном. У цистерн второго рода водяной соединительный канал отсутствует, т.к. в бортовых стенках имеются отверстия, которые сообщаются с забортной водой.
Принцип действия таких цистерн основан на создании стабилизирующего момента за счет перемещения массы жидкости из одного бортового отсека в другой. Перемещение жидкости вызывается качкой судна и не требуют дополнительных энергетических Рис. 52 Пассивные успокоительные цистерны: затрат. Подбором элементов цистерн, 1 – бортовые цистерны; 2 – воздушный канал размеров каналов и регулировкой 3 – клапан; 4 – водяной канал. клапана можно добиться равенства
периода колебаний жидкости в цистернах и периода собственных колебаний судна. Вследствие этого при резонансной качке возникает явление двойного резонанса: судно отстает по фазе от колебаний волны на 90 0 , а жидкость в цистернах – на 90 0 от колебаний судна. Суммарное отставание по фазе составляет 180 0 , цистерны работают в противофазе с водой (Рис.53), а возникающий стабилизирующий момент оказывается противоположным по знаку возмущающему моменту и противодействует наклонению судна.

Пассивные успокоительные цистерны наиболее эффективны при резонансной качке и менее эффективны на нерезонансных волнах. При некоторых условиях и режимах нерегулярного волнения такие успокоители могут привести к увеличению амплитуд качки.
Рис. 53 Последовательное положение воды в успокоительных цистернах при резонансной
Наличие свободной поверхности жидкости в цистернах также неблагоприятно влияет на остойчивость судна. Вследствие указанных причин пассивные цистерны в настоящее время практически не применяются.
Активные успокоители.К активным успокоителям качки относятсябортовые управляемые рули, активные успокоительные цистерны и гироскопические успокоители – стабилизаторы.
Бортовые управляемые рули являются весьма эффективным средством умерения

бортовой качки и получили широкое распространение на транспортных и особенно на пассажирских судах. Они представляют собой крылья малого удлинения, которые устанавливаются по бортам судна в районе скуловой части. Крылья размещены на специальных приводах, обеспечивающих изменение углов атаки по определенному закону, выдвижение их из корпуса и уборку внутрь корпуса(Рис. 54). Размеры и площадь управляемых рулей определяют путем соответствующего расчета в зависимости от наименьшей скорости судна, при которой предлагают их использовать.
Принцип действия бортовых управляемых рулей основан на возникновении стабилизирующего момента, противодействующего качке, путем надлежащей перекладки рулей. Стабилизирующий момент создается подъемными силами, образующимися на рулях правого и левого бортов при их обтекании потоком.
При положении, когда судно кренится с левого Рис. 54 Управляемые бортовые рули. борта на правый, а рули переложены так, что
хвостовая часть руля правого борта опущена вниз, а хвостовая часть левого борта поднята кверху, то в таком положении на руле правого борта возникает подъемная сила, направленная вверх, а на руле левого борта – подъемная сила, направленная вниз. Благодаря этому создается момент, противодействующий размаху качки.
Управление приводами рулей осуществляется комплексом специальных автоматических приборов, которые обеспечивают непрерывное измерение гироскопическими датчиками параметров качки судна (угла крена, угловой скорости и углового ускорения), вычисление подъемной силы и угла атаки руля и последующую подачу
команд на гидравлический привод, который обеспечивает необходимую перекладку рулей. Пост управления всей системой находится на мостике судна, а блоки силовых и исполнительных механизмов – в непосредственной близости от рулей в машинном отделении.
Эффективность работы бортовых управляемых рулей зависит от скорости судна, поскольку силы, создаваемые каждым рулем, пропорциональны квадрату скорости набегающего потока. Практика показала , что целесообразно применять бортовые рули при скоростях, превышающих 10 – 15 уз.
Вопросы для самоконтроля:
1.Для чего на судне устанавливают успокоители качки?
2.На какие виды делятся успокоители качки?
3.Что представляют собой скуловые кили и их принцип действия?
4.Конструкция и принцип действия пассивных успокоительных цистерн?
5.Какие средства относятся к активным успокоителям качки?
6.Что представляют собой бортовые управляемые рули и их принцип действия ?
Тема 2.2. Ходкость судна
2.2.1 типы судовых движителей и принцип их работы.
На морских судах чаще всего используют винты фиксированного шага (ВФШ) или виты регулируемого шага (ВРШ).
Гребной винт (ВФШ) представляет собой систему лопастей (от 2 до 8), каждая из которых является участком винтовой поверхности. Поверхность лопастей, обращенная в нос, называется засасывающей,. Поверхность, обращенная в корму – нагнетающей. Передняя кромка лопастей называется входящей, задняя – выходящей. ВФШ бывают цельнолитые и со съемными лопастями. Они делятся на винты левого и правого вращения. Винт правого вращения на переднем ходу, если смотреть с кормы, вращается по часовой стрелке, винт левого вращения – наоборот.
Сила упора, создаваемая винтом при его вращении с заданной частотой, зависит от его основных геометрических характеристик,
1. DВдиаметр винта - диаметр окружности, описываемой наиболее удаленными точками лопастей (до 5 метров);
2. H геометрический шаг винта – линейное расстояние по оси винта, которое проходила бы ступица за один полный оборот при вращении в плотной среде. (величина шагового отношения H/D колеблется 0.8 – 1.8)
3. Θ дисковое отношение Θ= А/Аd - для тихоходных судов ≈0.35
для быстроходных ≈ 1.2
А – суммарная площадь спрямленной поверхности всех лопастей винта;
Аd – площадь круга, ометаемого гребным винтом при его вращении.
4. Z число лопастей.
а так же от скорости самого судна.
Существенное влияние на силу упора винта оказывает взаимодействие винта с корпусом судна. Силу упора без учета такого взаимодействия называют упором изолированного винта. С учетом такого взаимодействия – полезным упором или тягой. Для ВФШ изменение направления упора достигается реверсированием двигателя. ВФШ имеет максимальный коэффициент полезного действия только при одном режиме движения (как правило, полный передний ход).
В отличии от гребных винтов фиксированного шага, винты регулируемого шага (ВРШ) имеют в ступице приводной механизм, с помощью которого осуществляется разворот лопастей от положения «ППХ» до положения «ПЗХ». Таким образом, без изменения направления вращения ГД, осуществляется изменение не только величины, но и направление упора винта. ВРШ могут быть трехлопастными и четырехлопастными. В последнем случае лопасти располагаются по парно и смещены вдоль оси винта (ВРШ типа «тендем»). Угол разворота лопастей при переходе с ППХ на ПЗХ составляет 40 – 50 0 . Время разворота лопастей ВРШ составляет 10 – 15 сек.. Использование ВРШ позволяет получить полную мощность ГД на режимах, отличных от расчетных, обеспечивает увеличение скорости судна и экономичность работы его двигательной установки.. ВРШ развивает значительно большую тягу на малых ходах и на 40 – 50% сокращает время и длину тормозного пути. Установка ВРШ позволяет осуществлять дистанционное управление судном и использовать на реверсивные двигатели, что значительно повышает их моторесурс. К недостаткам ВРШ следует отнести сложность конструкции как самого винта, так и валопровода, их большую, по сравнению с ВФШ, чувствительность к ударным нагрузкам.
Вопросы для самоконтроля:
12. Какие типы движителей используются на морских судах?
13. Что представляет собой гребной винт (ВФШ)?
14. От чего зависит сила упора, создаваемая ВФШ при его вращении с заданной частотой?
15. Что собой представляет и как осуществляется разворот регулируемого винта (ВРШ)?
Тема 2.3. Управляемость.
2.3.2 Крен судна на циркуляции.
Если на судне, идущем прямым курсом, внезапно переложить руль, то в первый момент после начала перекладки траектория движения судна искривится в направлении. обратном направлению перекладки руля. В этот момент на судно действуют следующие силы (Рис.55а):

Рис. 55 а – схема сил, накреняющих б – схема сил, накреняющих судно
судно после начала перекладки руля. в период установившейся циркуляции.
Ру – поперечная составляющая сил, действующих на руль;
Ry – поперечная составляющая сил, действующих на погруженную часть корпуса судна;
Fц – поперечная составляющая центробежных сил инерции судна, линия действия этой
силы направлена в сторону поворота судна;
Сила Ру приложена в центре давления руля, возвышение которого над основной плоскостью определяется аппликатой z′d ; сила Ryприложена на высоте zd , а сила Fц – в центре тяжести судна, определяемом аппликатой zg.
Момент центробежной силы Fц вызывает небольшой крен на тот борт , на который переложен руль ( моментом силы Ryпренебрегаем в виду малым действием этой силы в начальной стадии циркуляции). Этот крен усиливается моментом силы Ру , действующей на руль.
Итак, в первый момент после перекладки руля судно будет крениться на тот борт, на который переложен руль, т.е. внутрь циркуляции.
По мере изменения кривизны траектории центробежная сила уменьшается, а затем меняет знак, т.е. изменяет направление действия на противоположное (Рис.55б). Одновременно происходит нарастание момента от силы Ry вследствие увеличения угла дрейфа и уменьшения момента от силы Ру из – за снижения скорости судна. В результате изменения характера действия указанных сил и моментов судно сначала выпрямляется, а затем начинает крениться в сторону, обратную направлению перекладки руля, причем наклонение судна оказывается тем больше, чем больше был угол крена в сторону перекладки руля. Изменение направления крена носит динамический характер.
Максимальное наклонение в сторону, обратную направлению перекладки руля, называют динамическим углом крена судна на циркуляции.
При дальнейшем движении судна угол крена уменьшается. Судно делает одно – два колебания, и после того как элементы движения устанавливаются, угол крена приобретает некоторое постоянное значение на установившейся циркуляции. Этот угол совпадает по знаку с динамическим углом крена, но последний, как правило, превышает угол крена на установившейся циркуляции в 1,5 – 2,0 раза.
Морской Регистр в действующих «Правилах классификации и постройки морских судов» предписывает определять кренящий момент на циркуляции по формуле:
mкр = 0,238 (zg )(2.3)
где: –масса судна с учетом присоединенной массы воды. участвующей в движении, т;
скорость судна при выходе на циркуляцию, равная 80% скорости полного хода;
Отсюда после соответствующих преобразований получим формулу для определения
угла крена на установившейся циркуляции:
θ 0 1,4 (zg )(2.3.1)
Выражение (2.3.1), представляющее известную формулу Г.А. Фирсова, показывает, что угол крена, возрастающий пропорционально квадрату скорости при выходе на циркуляцию, обратно пропорционален метацентрической высоте h.
Расчеты дают хорошие результаты для транспортных морских судов, диаметр циркуляции которых обычно не превышает пяти длин судна при максимальном угле перекладки руля.
Согласно «Правилам классификации и постройки морских судов» морского Регистра», угол крена пассажирских судов от совместного действия кренящих моментов, возникших в результате скопления пассажиров на одном борту и действия внешних сил на установившейся циркуляции, не должен превышать 3 /4 угла заливания или угла, при котором палуба надводного борта входит в воду или скула выходит из воды – смотря по тому, какой угол меньше; во всяком случае угол крена не должен превышать 12 0 .
Вопросы для самоконтроля:
1. Какие силы действуют на судно при перекладке руля на циркуляции?
2. Как действуют силы, накреняющие судно после начала перекладки руля и в период
установившейся циркуляции?
3. Как определяется кренящий момент на циркуляции, предписанный Регистром судоходства?
4. Как определяется угол крена на установившейся циркуляции?
5.Требования Регистра судоходства о максимальной величине угла крена у пассажирских судов ?
ЛИТЕРАТУРА:
1. Ф.Н. Белан , А.М. Чудновский .Основы теории судна . – Л : Судостроение , 1978
2. И.И.Бендус . Теория и устройство судна.Часть 1.2-е изд. перераб.и доп.-Керчь.:КГМТУ , 2006
3. В.Д. Кулагин . Теория и устройство промысловых судов .- Л.; Судостроение , 19861. Л.Р. Аксюткин . Контроль остойчивости морских судов .- Одесса:Фенікс,2003
4. А.М. Горячов,Е.М. Подругин . Устройство и основы теории морских судов .- Л.;Судостроение,1981
5. Судовые документи : БМРТ « Николай Островский » , РТМА « Прометей »
6. В.Л. Фукельман . Основы теории корабля .- Л.;Судостроение,1977
ПРИЛОЖЕНИЕ I.
Понятие об остойчивости судна
При плавании в море на суда постоянно воздействуют различные кренящие нагрузки и в первую очередь ветер и волнение. Каким же образом может сравнительно небольшое судно противостоять шквальному ветру и обрушивающимся на палубу волнам, накреняясь то на правый, то на левый борт, но не опрокидываясь? Ответ па эти вопросы дает учение об остойчивости.
Остойчивостью называется способность судна, выведенного из положения равновесия воздействием внешних кренящих нагрузок, вновь возвращаться в первоначальное положение после прекращения этого воздействия.
Остойчивость — одно из основных мореходных качеств, сохранение и поддержание ее является важнейшей задачей экипажа судна.
Термин «остойчивость» произошел от понятия об устойчивости равновесия тел, однако он имеет более широкий смысл. При рассмотрении устойчивости обычно имеют в виду только малые отклонения от положения равновесия, а при рассмотрении остойчивости судна — как малые, так и большие. Отклонение судна от равновесного положения в поперечной плоскости называется креном, в продольной — дифферентом.
Различают остойчивость при малых наклонениях (начальную) и остойчивость на больших углах крена. Выделение начальной остойчивости в самостоятельный раздел позволяет ввести ряд допущений, значительно упрощающих математические зависимости при решении различных практических задач. Формулы начальной остойчивости могут быть применены до углов крена, соответствующих входу кромки палубы в воду в том случае, если скула не выходит из воды. Эти углы для обычных судов составляют 8—12° и более. Формулы начальной остойчивости следует рассматривать как частный случай зависимостей, относящихся к остойчивости на больших углах крена.
При рассмотрении остойчивости подразумевается, что судно наклоняется под действием пары сил; величина силы поддержания не изменяется. При этом объем подводной части сохраняется постоянным, а меняется только ее форма. Такие наклонения и соответствующие им ватерлинии, отсекающие одинаковые объемы, называются равнообъсмными. В задачах о начальной остойчивости равнообъемные ватерлинии проводят через центр тяжести исходной ватерлинии.
Автор статьи

Читайте также: